V
主页
自驾场景 快速训练!CarDreamer:首个开源世界模型自动驾驶平台
发布人
嘉宾介绍 周寒初 University of California, Davis(UCD)DARE实验室在读博士。本科毕业于浙江大学控制科学与工程专业。研究方向为自动驾驶,强化学习,机器人。 直播大纲 1.现有的基于World Model的强化学习介绍 2.CarDreamer平台介绍 3.成果展示,代码用法、平台结构介绍 4.未来工作讨论
打开封面
下载高清视频
观看高清视频
视频下载器
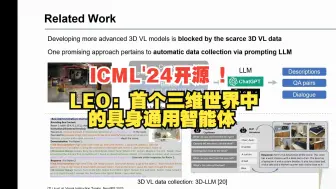
ICML'24开源 !LEO:首个三维世界中的具身通用智能体-上篇
当MVS遇上Gaussian MVSGaussian 快速、可泛化的高斯重建框架!-上篇
(公开课)视觉SLAM原理与ORB-SLAM3系列算法
四旋翼模型与控制基础
SIGGRAPH'2024|RTG-SLAM:基于3DGS的大尺度场景实时三维重建-上篇
DoGaussian:分布式训练3DGS,速度提升6倍以上,高质量渲染-上篇
大作业|激光-视觉-IMU-GPS融合SLAM算法
PID控制器原理讲解
三维点云系列视频——第一章绪论
Occupancy Networks后处理
国内首个面向具身智能方向的理论与实战系统课程
【B站强推】一小时彻底掌握提示工程(Prompt Engineering)超详细,草履虫都能听懂!!!(大模型|LLM|多模态|人工智能)
传感器与遥控器校准原理
CVPR'24 Symphonies:基于实例级建模的3D场景占用
CVPR23开源 超越LoFTR!大尺度变化下的特征匹配!
港科大最新 开放词汇3D物体检测新SOTA-CoDAv2p-下篇
牛津VGG团队最新开源!Flash3D:一张图像重建整个3D场景!通用性超强!
英伟达-OmniDrive:基于稀疏查询的三维自驾VLM框架
CVPR'24开源 通过3D GS进行整体城市3D场景理解!
货不对板?华为ADS基础版智驾一点不“基础”
入门Dify工作流 | 基于爬虫与LLM的新闻编辑助手
端到端基础!绕不开的感知模块
如何进行三维重建?从单帧深度估计到完整模型重建
【包教会的】langchain极简入门,从入门到实战,langchain系统教学!
单目深度估计|连续帧方法实战课
Dify快速入门 | 本地部署Dify基于Llama 3.1和OpenAI创建聊天机器人与知识库
吊打ORB3!73Hz!南洋理工重磅开源AirSLAM:无惧复杂光照的超强点线视觉SLAM!
BEVFormer:时空transformer架构
图解minicpm-v-2.6源码(debug的形式 一个视频看懂他的网络结构)
ORB-SLAM3基本原理与系统架构
CVPR满分论文!即插即用的6D物体姿态估计大模型(BOP排行榜第一)
Splatam:用于稠密RGB-D SLAM的3D高斯的溅射、跟踪和建图
【llama3.1】国内可直接使用教程,405B堪称最强开源大模型,API无限调用,迪哥手把手教你你怎么玩,这也太强大了!
Transformer模型结构
大模型专家,冒充双非1年,期望40K
Llama3.1-8B-微调-部署
GraphRAG+阿里云通义千问大模型、百度文心千帆、智谱ChatGML等打造本地知识库,本地搜索、全局搜索二合一!#graphrag #rag #通义千问
MiniCPM-V 2.6 部署指南
五分钟开发一款自己的点云处理软件(python)
《基于ROS2的决策规划算法工程》动态避障演示 无人小车的松弛感