V
主页
ORB-SLAM3基本原理与系统架构
发布人
主讲介绍:曾铂,博士毕业于电子科技大学,江苏省“双创博士”,某头部IT大厂机器人技术顾问,中国计算机学会智能机器人专委会、计算机视觉专委会委员。长期从事机器人导航、视觉SLAM、深度强化学习导航方面的研究工作, 在包括IEEE Transactions等SCI期刊和国际会议上发表多篇学术论文,出版机器人专著1项。同时担任IEEE TETCI、IEEE JAS、IROS、自动化学报等多个机器人SCI期刊和国际会议审稿人。精通主流视觉SLAM算法和基于深度强化学习的视觉导航算法。 *注:本视频为付费课程公开课,视频中的所有资料仅对学员开放。
打开封面
下载高清视频
观看高清视频
视频下载器
研究生必学!目前B站最好的【三维重建】教程,15小时深入浅出SfM与SLAM核心算法!计算机视觉3D三维重建/摄像机几何/多视图几何
(公开课)视觉SLAM原理与ORB-SLAM3系列算法
激光-视觉-IMU-GPS融合SLAM系列课程-传感器介绍与代表性SLAM解析
香港大学发表超强无人机实时避障算法:以后无人机再也不怕撞了!
从零搭建一套结构光3D重建系统 [理论+源码+实践]
OA-SLAM:在视觉SLAM中结合物体语义进行相机重定位[ISMAR 2022]
大作业|激光-视觉-IMU-GPS融合SLAM算法
107 FPS!开源!结合ICP和3D GS构建最快的稠密SLAM!
相机标定的基本原理与经验分享
小白如何手写g2o优化? 残差构建、雅克比推导、优化函数
CVPR'24开源|NeRF-SLAM新SOTA:请任意选择你的高效神经
SLAM里程碑!戴森机器人实验室最新开源:3D GS杀入SLAM!
ICCV 2023|第一种稀疏的仅视觉的交叉视图定位方法!
ICRA23开源 动态环境下高鲁棒的雷达MOT SLAM!
最新ICRA2021论文,基于成像激光雷达的稳健位置识别,代码开源!
如何处理视觉SLAM长期定位中的外观变化和轨迹漂移?
如何轻松拿捏LIO-SAM-数学基础篇
华为最新工作:RoadMap:用于自动驾驶视觉定位的轻量化语义地图
港大火星实验室:在大规模杂乱的3D环境中进行快速无人机探索方案
ICRA23开源 !动态环境下高鲁棒的雷达MOT SLAM!
20+FPS!最新开源!加上回环检测的NeRF SLAM竟是如此精确!
MIT工作:Kimera,新的实时度量语义的开源SLAM系统(ICRA2020)
经典SLAM框架LOAM升级版!Fast LOAM,速度提升3倍!
ORB-SLAM3系列之特征匹配(三 MLPnP,词袋模型)
代码开源!伦敦大学学院:DSP-SLAM:物体特征级SLAM
神经辐射场照亮动态SLAM:构建精细场景地图
Navigation2:基础论文导读
ICP代码讲解及答疑解惑
顶刊论文:LineTR:用于视觉定位的上下文感知线描述符
NeRF何去何从?GS SLAM到底哪家强?来看看最新的开源方案!
南洋理工大学开源F-LOAM:最为精确和快速的开源激光SLAM方案之一
SIGGRAPH'2024|RTG-SLAM:基于3DGS的大尺度场景实时三维重建-上篇
华科博士经验分享:深度学习特征的长期视觉SLAM系统
GPS信息丢失,利用3D语义信息来精准定位自动驾驶车辆位置,精度达到10m!
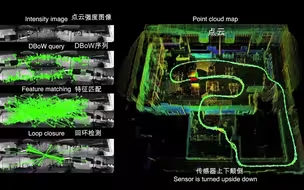
ICRA2020论文,基于CNN和点云分割的LiDAR-SLAM点云回环检测方法
Go!最新NeRF和SLAM结合开源方案!超越NICE-SLAM和DROID-SLAM!
【3D视觉工坊】第七期公开课:图像对齐算法
7月6日组会:2024CVPR 中使用3DGS的SLAM
光学3D测量技术原理及应用
KITTI上准确率第二,具有GPU加速GICP匹配代价因子的全局一致的3D LiDAR映射