V
主页
ACfly-T265第九次飞,人走到T265前面拍摄,后来不小心碰到油门炸机,挺可惜的VID_20201109_163141
发布人
ACfly-T265第九次飞,人走到T265前面拍摄,后来不小心碰到遥控器油门炸机,挺可惜的,这种低级错误以后真的要注意啊。
打开封面
下载高清视频
观看高清视频
视频下载器
小车跑vinsgpu-ego VID_20221010_143409 截取视频
观看FASTLAB的一次飞行,挺稳的 20221027
无人机起飞前看T265的参数是否稳定,基本是毫米级跳动,也看无人机是否朝向正北,这也是第一次真正飞成前拍的VID_20200901_145226
ACfly-T265第三次飞,纯T265,也是第一次真正完整飞成VID_20201107_163144
把基于opencv4的vins-mono前端改为superpoint+光流 20230918_160125 截取视频
北理工自动化-夏元清-多智能体协同控制
ubuntu18.04-win10双系统修改开启启动顺序(修改为默认选win10启动)VID_20201111_002250
ACfly-T265第六次飞,多次小步打杆飞到床上,吸取昨天一次性打杆飞比较长距离的教训,一次打杆飞一小段VID_20201109_095610
ACfly的UART驱动程序代码讲解,基于freertos.20201026_233002 截取合并1
跟他人学PX4的PID调参录屏 20210423_143805
基于T265和D435i octomap_server功能包实现octomap增量式建图 20220428_095553 截取视频 截取合并
智能无人机课程 2 四旋翼无人机的组成和拼装 上
ACfly-T265炸机后拍VID_20201109_163647
跑CMU的far_planner 还是存在一些问题 屏幕录像 2024-02-29 10:42:24
智能无人机课程 14 多机协同控制
ACfly-T265第五次飞,打杆飞更大距离,停下后飘得更多些,撞墙炸机,室内小也是尴尬VID_20201108_174432
基于bag包跑一下今天刚看到的基于SVO改的SchurVINS 20240417_132838
基于opencv的SGBM对D435i双目做立体匹配输出深度图演示与简单说明 20240326_211324
ACfly-T265的遥控器操作VID_20201110_234539
智能无人机课程 9 试飞无人机
2021弄T265与GPS融合 VID_20210829_100242
智能无人机课程 13 PX4仿真平台搭建
我的ACfly F330拆之前再拍一次(更高清)VID_20201027_142832
智能无人机课程 10 飞行日志分析与pid调参
ACfly-T265第七次飞,拉上窗帘看定点效果VID_20201109_121755
基于bag包跑港大的dyn_small_obs_avoidance 20230310_220441 截取视频
双目imu MSCKF 无人机定点飞行测试 20230814
ACfly与树莓派T265初步跑通所拍摄视频VID_20201028_112201
VID_20200720_193310,b为2.8,第一次室外空旷地飞,莲花湖边,刚插电就有GPS信号,最高飞20米,GPS定点很稳,姿态也稳,可能没什么风。
aruco二维码检测定位原理讲解及基于opencv的代码和ros功能包实现 20240403_181351
把ego的plan_env模块单独取出订阅位姿和深度图构建自己可用的导航地图 20240315_091408 截取视频 截取合并
【南京航空航天大学】无人机设计导论(全46讲)昂海松
人在T265前面走动,遥控器控制无人机VID_20200903_101310
运行部署好的Structure-PLP-SLAM,实际还有些问题,起来运行不了多久就挂掉了20221007_004441 截取视频
基于D435i跑vins+DenseSurfelMapping注意点说明与操作演示20240328_202507
ACfly-树莓派-T265整个系统都跑通,坐标系确认正确,屏幕显示OK,准备下一步实飞VID_20201029_170608
发期望姿态+推力实现无人机悬停和走轨迹 VID_20220327_173714
APMT265树莓派 第二次飞成(移到离墙近得地方,特征点明显些,可能效果就好些了)
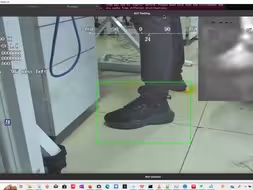
基于opencv实现先飞吊舱的KCF框选跟踪 20231110
ACfly-T265第二次飞(纯T265)VID_20201107_151114