V
主页
京东 11.11 红包
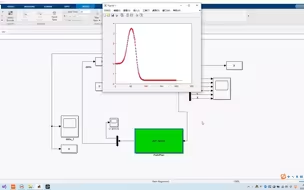
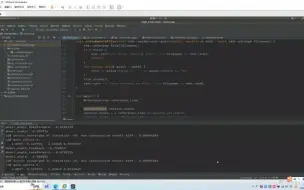
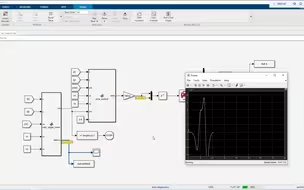
c++实现的apollo_fem_smoother,用于参考路径的平滑
发布人
apollo fem路径平滑算法的c++实现。
打开封面
下载高清视频
观看高清视频
视频下载器
Apollo参考线平滑(fem-qp)算法-matlab尝试
强化学习-自动驾驶路径规划控制决策-sac的高速公路和遮挡场景训练
自动驾驶控制-非线性Nmpc跟踪双移线路径
自动驾驶控制-基于车辆运动学模型的MPC路径跟踪
Stanely和Lqr算法的c++实现
自动驾驶控制-基于车辆运动学模型的LQR路径跟踪
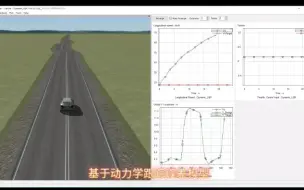
自动驾驶控制-三自由度动力学模型mpc跟踪自定义路径
matlab与carsim联合纯跟踪路径跟踪算法仿真
自动驾驶路径跟踪-纯跟踪和MPC算法的C++实现
基于Nmpc的自动驾驶路径规划与MPC的路径跟踪
自动驾驶控制-横向mpc纵向双pid轨迹跟踪
自动驾驶控制-stanely路径跟踪仿真
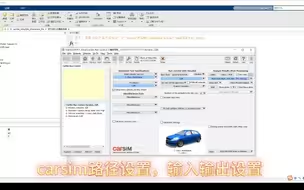
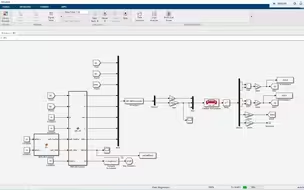
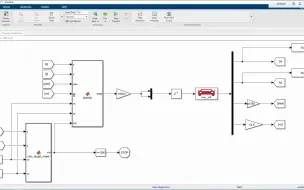
simulink与carsim 自动驾驶路径跟踪
自动驾驶控制-动力学跟踪误差模型LQR路径跟踪
基于运动学模型的MPC跟踪双移线路径
路径跟踪Stanely算法仿真
新人教 七上英语u1 sb阅读课课堂实录
自动驾驶控制-纯跟踪路径跟踪仿真
自动驾驶控制-动力学跟踪误差模型MPC路径跟踪
Stanely算法跟踪双移线路径
有一点像,但是不多......
从零到一学飞书(日历功能)
改编老王(决策规划)--控制用的mpc,另外可以实现超车
vscode配置c/c++安装使用教程vscodec语言环境配置Visual Studio Code使用教程安使用教程苹果电脑mac安装vscode下载教程苹果
自动驾驶控制-单点预瞄PID路径跟踪
新人教|英语七上su3 读写课课堂实录 全英课堂 阅读课 文章结构梳理
纯跟踪算法跟踪双移线路径
新人教英语| 七上u1第二课时对话课堂实录公开课
汽车运动学与动力学系列-魔术轮胎模型验证
新教材七上英语u1语法课| 一般现在时中的be动词和人称代词的搭配(主谓一致) 陈述句变一般疑问句
新人教七上unit 1 you and me第一课时听说课
中日双语|什么是“鏡開き”?
英语七上u1 project 作文写作课 my personal profile 自我介绍
2024最新小学英语优质课观摩—Making Breakfast
自动驾驶控制-运动学模型MPC跟踪圆形轨迹
自动驾驶控制-二自由度横摆动力学模型MPC跟踪任意路径
七上绝对值难题,学霸都蒙圈,转化为零零模型瞬间解决,收藏吧
甲戌月运系列(10.8-11.6),先聊聊甲戌月在甲辰年的重要性:很明显,这个甲戌是一道进入乙巳年的练习题。
汽车运动学与动力学系列-二自由度车辆动力学模型验证
自动驾驶控制-纵向MPC横向LQR轨迹跟踪