V
主页
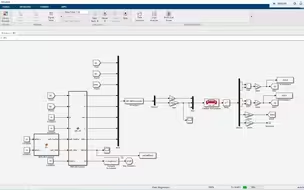
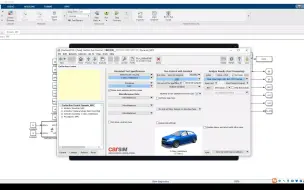
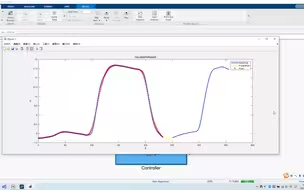
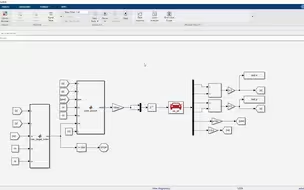
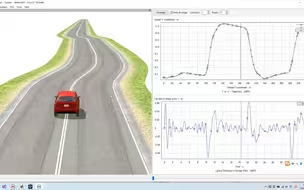
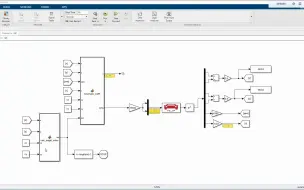
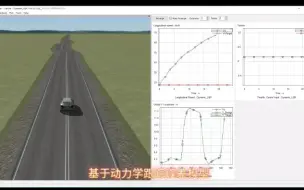
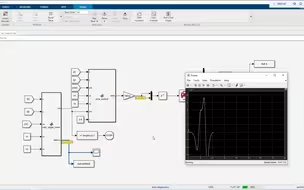
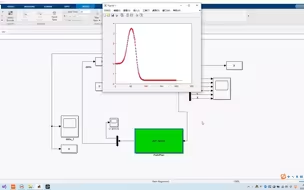
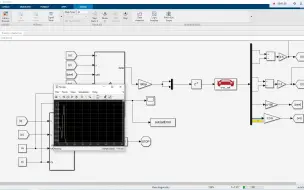
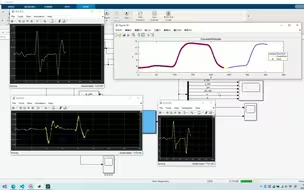
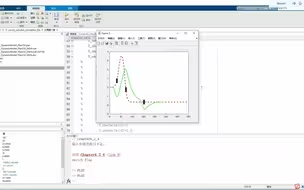
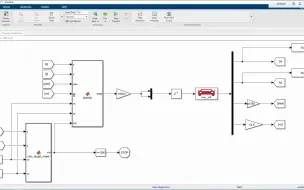
基于运动学模型LQR跟踪双移线路径
发布人
基于车辆运动学模型,使用LQR算法跟踪双移线路径,上一个LQR模型代码有一点点问题,在这个模型做了一些改正。
打开封面
下载高清视频
观看高清视频
视频下载器
自动驾驶控制-单点预瞄PID路径跟踪
基于运动学模型的MPC跟踪双移线路径
自动驾驶路径跟踪-纯跟踪和MPC算法的C++实现
自动驾驶控制-动力学跟踪误差模型MPC路径跟踪
自动驾驶控制-二自由度横摆动力学模型MPC跟踪任意路径
matlab与carsim联合纯跟踪路径跟踪算法仿真
自动驾驶控制-基于车辆运动学模型的MPC路径跟踪
自动驾驶控制-动力学跟踪误差模型LQR路径跟踪
自动驾驶控制-基于车辆运动学模型的LQR路径跟踪
simulink与carsim 自动驾驶路径跟踪
纯跟踪算法跟踪双移线路径
自动驾驶控制-纯跟踪路径跟踪仿真
自动驾驶控制-非线性Nmpc跟踪双移线路径
Stanely算法跟踪双移线路径
自动驾驶控制-三自由度动力学模型mpc跟踪自定义路径
基于Nmpc的自动驾驶路径规划与MPC的路径跟踪
路径跟踪Stanely算法仿真
自动驾驶控制-stanely路径跟踪仿真
汽车运动学与动力学系列-二自由度车辆动力学模型验证
自动驾驶控制-横向mpc纵向双pid轨迹跟踪
自动驾驶控制-横纵向MPC轨迹跟踪控制
Stanely和Lqr算法的c++实现
改编老王(决策规划)--控制用的mpc,另外可以实现超车
自动驾驶控制-运动学模型MPC跟踪圆形轨迹
自动驾驶控制-纵向MPC横向LQR轨迹跟踪
自动驾驶控制-基于mpc的速度跟踪控制
[个人中字]使用simulink搭建车辆模型——Matlab&Simulink Racing Lounge
Comsol可视化二维CT扫描图像编辑、随机多孔介质、随机圆模型构建程序,基于matlab_gui界面
基于LQR控制的主动悬架
课题组研究生培训——专题9:新能源机组高、低电压穿越的基本概念及PSCAD/MATLAB建模仿真
课题组研究生培训——专题7:光伏发电的基本原理和PSCAD/MATLAB仿真模型
comsol教程三:网格划分、网格导入、自适应网格、动网格
课题组研究生培训——专题5:三相两电平电压源逆变器的基本原理及PSCAD/MATLAB仿真
课题组研究生培训——专题11:直流输电基本原理及PSCAD/EMTDC仿真
内嵌永磁电机的电流角与效率MAP仿真
Simulink环境下的Matlab强化工具箱使用
【全300集】高考英语高中英语完整版教程,刘彬3500英语词汇巅峰速记!必修1-必修2全集,(附讲义+PDF电子版)
汽车运动学与动力学系列-车辆运动学模型验证
OpenLoong状态估计之基于接触和运动学的LegOdom
Ansys Workbench经典案例合集