V
主页
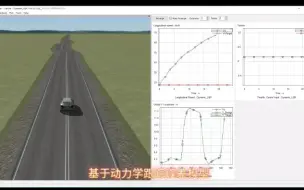
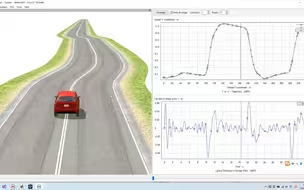
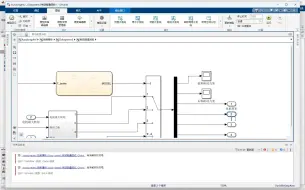
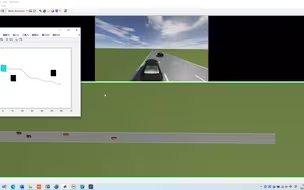
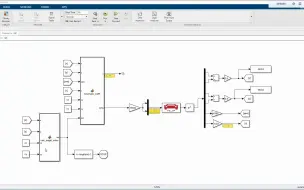
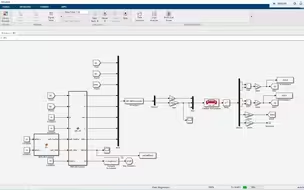
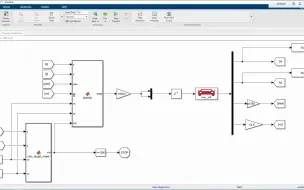
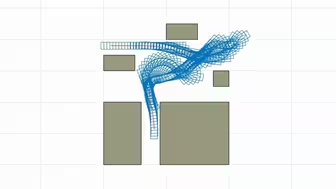
自动驾驶控制-横向mpc纵向双pid轨迹跟踪
发布人
自动驾驶轨迹跟踪,横向mpc纵向双pid,需要模型私信
打开封面
下载高清视频
观看高清视频
视频下载器
自动驾驶控制-二自由度横摆动力学模型MPC跟踪任意路径
自动驾驶控制-横纵向MPC轨迹跟踪控制
自动驾驶路径跟踪-纯跟踪和MPC算法的C++实现
自动驾驶控制-三自由度动力学模型mpc跟踪自定义路径
matlab与carsim联合纯跟踪路径跟踪算法仿真
自动驾驶控制-纯跟踪路径跟踪仿真
自动驾驶控制-非线性Nmpc跟踪双移线路径
9.simulink官方教学-第9章 模型引用
simulink与carsim 自动驾驶路径跟踪
自动驾驶控制-基于车辆运动学模型的MPC路径跟踪
自动驾驶控制-动力学跟踪误差模型MPC路径跟踪
制动能量回收11
汽车运动学与动力学系列-二自由度车辆动力学模型验证
改编老王(决策规划)--控制用的mpc,另外可以实现超车
自动驾驶控制-基于mpc的速度跟踪控制
自动驾驶控制-基于车辆运动学模型的LQR路径跟踪
自动驾驶控制-单点预瞄PID路径跟踪
基于Nmpc的自动驾驶路径规划与MPC的路径跟踪
自动驾驶控制-纵向MPC横向LQR轨迹跟踪
媳妇,今晚我是你的了
自动驾驶控制-stanely路径跟踪仿真
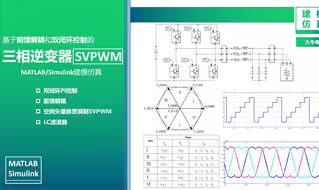
三相逆变器(二) 双闭环控制SVPWM空间矢量脉宽调制前馈解耦MATLAB/Simulink仿真
自动驾驶控制-运动学模型MPC跟踪圆形轨迹
Stanely算法跟踪双移线路径
自动驾驶控制-动力学跟踪误差模型LQR路径跟踪
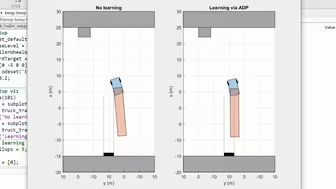
半挂车泊车算法
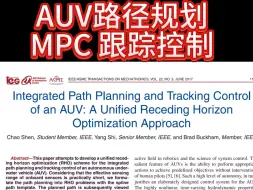
IEEE trans:水下机器人AUV的路径规划和基于模型预测控制MPC的跟踪框架
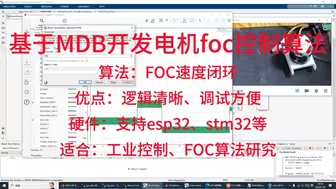
基于纯simulink开发FOC电机控制算法
纯跟踪算法跟踪双移线路径
基于运动学模型的MPC跟踪双移线路径
路径跟踪Stanely算法仿真
Stateflow教程 05 流程图常用样板(Pattern)的使用
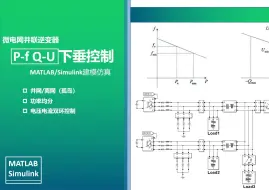
微电网逆变器并联(一)下垂控制P-f Q-U并网离网孤岛分布式电源MATLAB/Simulink仿真
双向储能变流器PCS(一) 【复现】双级式两级式储能逆变器充放电MATLAB/Simulink仿真
半挂车混合A*路径规划大法
课时61.Simulink模型整合自定义C结构体并生成指针变量
汽车运动学与动力学系列-魔术轮胎模型验证
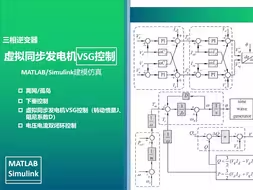
虚拟同步发电机VSG(一)三相逆变器孤岛离网MATLAB/Simulink仿真
买电机去咯!
10.simulink官方教学-第10章 创建libraries