V
主页
京东 11.11 红包
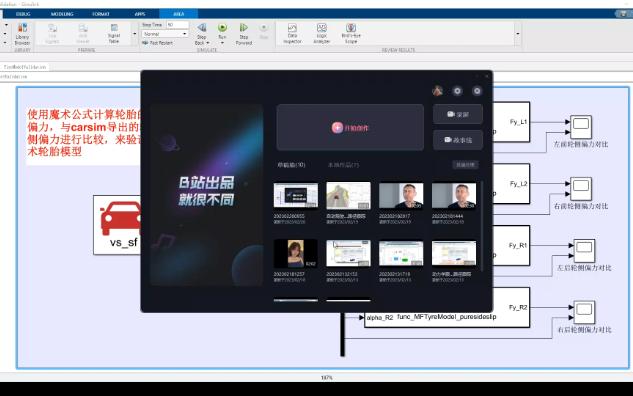
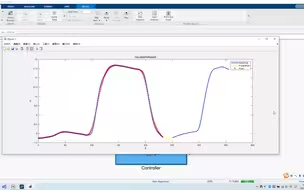
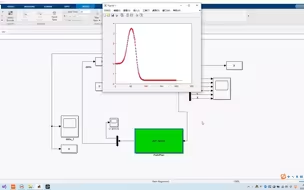
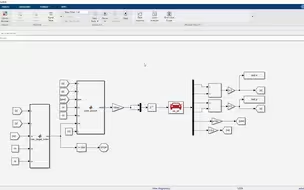
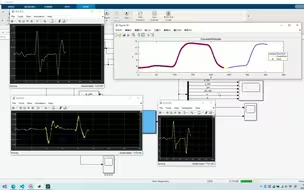
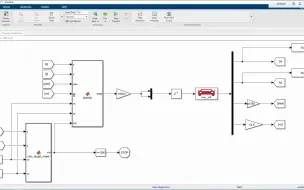
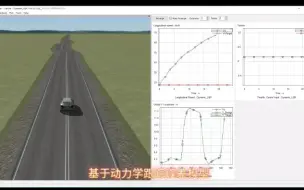
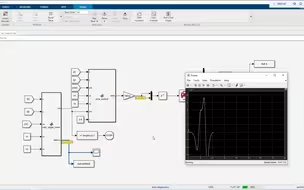
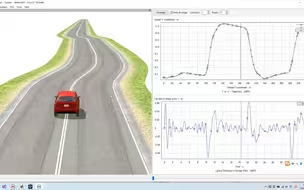
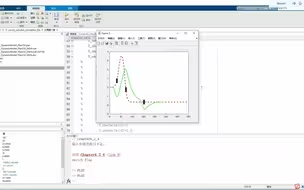
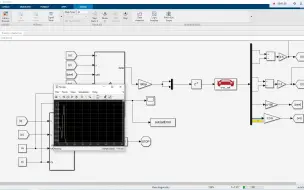
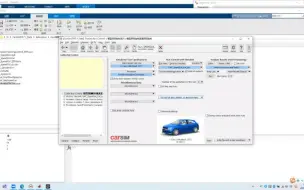
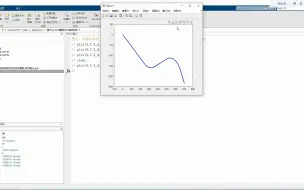
汽车运动学与动力学系列-魔术轮胎模型验证
发布人
魔术轮胎模型验证,使用carsim输出的侧偏角和垂向力,利用魔术轮胎公式,计算轮胎侧偏力与carsim输出的侧偏力进行对比,需要模型私信
打开封面
下载高清视频
观看高清视频
视频下载器
自动驾驶控制-二自由度横摆动力学模型MPC跟踪任意路径
汽车运动学与动力学系列-二自由度车辆动力学模型验证
自动驾驶控制-动力学跟踪误差模型MPC路径跟踪
汽车运动学与动力学系列-带遗忘因子的递推最小二乘法轮胎线性侧偏刚度估计
自动驾驶控制-动力学跟踪误差模型LQR路径跟踪
自动驾驶控制-横纵向MPC轨迹跟踪控制
自动驾驶控制-横向mpc纵向双pid轨迹跟踪
改编老王(决策规划)--控制用的mpc,另外可以实现超车
自动驾驶控制-纯跟踪路径跟踪仿真
自动驾驶控制-基于车辆运动学模型的LQR路径跟踪
自动驾驶控制-非线性Nmpc跟踪双移线路径
matlab与carsim联合纯跟踪路径跟踪算法仿真
自动驾驶控制-三自由度动力学模型mpc跟踪自定义路径
汽车运动学与动力学系列-车辆运动学模型验证
自动驾驶控制-运动学模型MPC跟踪圆形轨迹
自动驾驶控制-纵向MPC横向LQR轨迹跟踪
自动驾驶控制-stanely路径跟踪仿真
路径跟踪Stanely算法仿真
simulink与carsim 自动驾驶路径跟踪
纯跟踪算法跟踪双移线路径
自动驾驶控制-基于车辆运动学模型的MPC路径跟踪
基于Nmpc的自动驾驶路径规划与MPC的路径跟踪
自动驾驶路径跟踪-纯跟踪和MPC算法的C++实现
Stanely算法跟踪双移线路径
自动驾驶控制-基于mpc的速度跟踪控制
汽车电子MBD专项课程01 - 模型代码生成
自动驾驶控制-单点预瞄PID路径跟踪
信号相关性的matlab实例
路径规划|基于维诺图的路径规划算法(ROS C++/Python/Matlab实现)
基于matlab gui的电力系统故障分析
Stanely和Lqr算法的c++实现
少帅下飞机,matlab浅浅跟个风(三连取源码)
【仿真开源】四足机器人MPC webots+matlab 初学入门 简介链接
虚拟同步发电机VSG(六)不对称跌落LVRT低电压穿越电网不平衡跌落MATLAB/Simulink仿真
马斯克的“豪赌”,科技业将“巨变”!
基于运动学模型的MPC跟踪双移线路径
少帅下飞机,但matlab图像处理
“我女朋友也是这样”
基于运动学模型LQR跟踪双移线路径
Matlab系统建模实例 —— CSDAC的Matlab建模与电路设计