V
主页
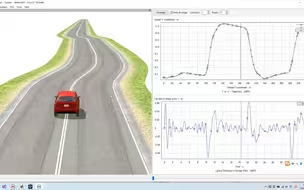
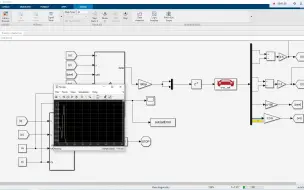
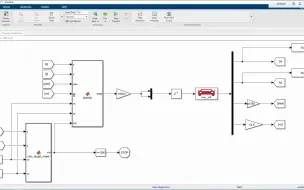
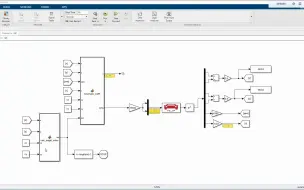
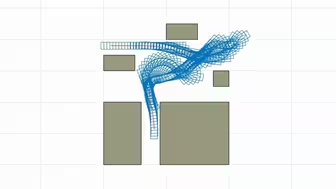
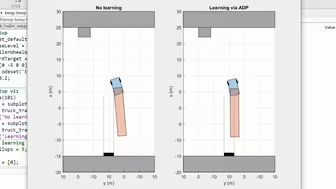
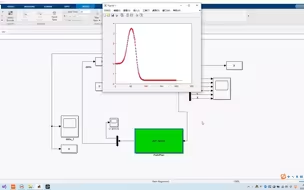
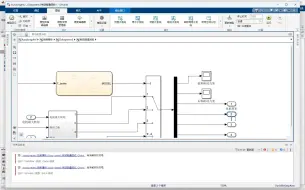
自动驾驶控制-动力学跟踪误差模型LQR路径跟踪
发布人
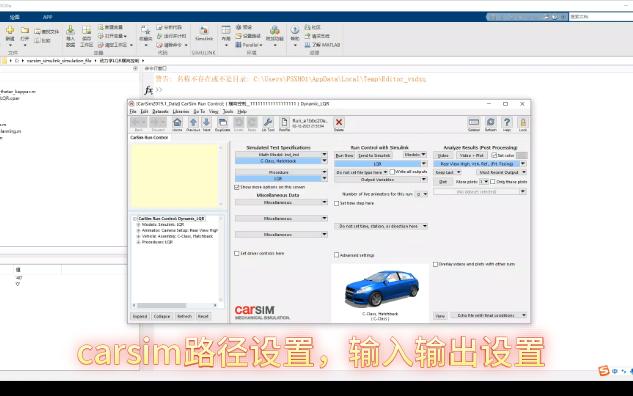
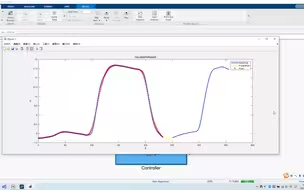
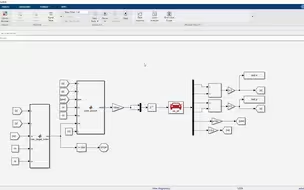
选取ed,edot,ephi,ephi_dot为状态量,使用lqr算法,进行路径跟踪,其中反馈矩阵K为离线计算,没有采用迭代的在线计算方法,需要模型的私信或者看主页个人详情。
打开封面
下载高清视频
观看高清视频
视频下载器
自动驾驶控制-二自由度横摆动力学模型MPC跟踪任意路径
matlab与carsim联合纯跟踪路径跟踪算法仿真
自动驾驶控制-动力学跟踪误差模型MPC路径跟踪
自动驾驶控制-单点预瞄PID路径跟踪
路径跟踪 | 最优控制LQR算法实现(ROS C++/Python/Matlab)
自动驾驶控制-三自由度动力学模型mpc跟踪自定义路径
自动驾驶路径跟踪-纯跟踪和MPC算法的C++实现
simulink与carsim 自动驾驶路径跟踪
自动驾驶控制-stanely路径跟踪仿真
自动驾驶控制-基于车辆运动学模型的MPC路径跟踪
Stanely算法跟踪双移线路径
路径跟踪Stanely算法仿真
自动驾驶控制-基于车辆运动学模型的LQR路径跟踪
强烈推荐!东南大学无人驾驶智能汽车技术全套教程!终于找到的精品公开课!存下吧,比啃书好多了!—卡尔曼滤波、激光雷达、目标检测、感知技术、神经网络、路径规划
IEEE trans:水下机器人AUV的路径规划和基于模型预测控制MPC的跟踪框架
基于Nmpc的自动驾驶路径规划与MPC的路径跟踪
纯跟踪算法跟踪双移线路径
自动驾驶控制-横向mpc纵向双pid轨迹跟踪
自动驾驶控制-纯跟踪路径跟踪仿真
半挂车混合A*路径规划大法
翻遍B站终于找到的无人驾驶技术教程!卡尔曼滤波、GNSSINS定位、感知激光雷达、神经网络、语义分割、目标检测、路径规划一口气学会!简直是智能汽车技术小白救星!
汽车运动学与动力学系列-二自由度车辆动力学模型验证
自动驾驶控制-纵向MPC横向LQR轨迹跟踪
半挂车泊车算法
基于运动学模型的MPC跟踪双移线路径
基于运动学模型LQR跟踪双移线路径
9.simulink官方教学-第9章 模型引用
自动驾驶控制-横纵向MPC轨迹跟踪控制
自动驾驶控制-运动学模型MPC跟踪圆形轨迹
自动驾驶控制-非线性Nmpc跟踪双移线路径
自动驾驶控制-基于mpc的速度跟踪控制
制动能量回收11
Stanely和Lqr算法的c++实现
汽车运动学与动力学系列-魔术轮胎模型验证
基于LQR控制的主动悬架
开环端到端demo展示
改编老王(决策规划)--控制用的mpc,另外可以实现超车
这可能是B站最新的MATLAB教程了!花3小时就能从入门到精通,能听懂人话就行,包教包会!
虚拟同步发电机VSG(一)三相逆变器孤岛离网MATLAB/Simulink仿真
电池模型参数辨识方法-基于麻雀搜索算法的电化学电池模型参数辨识