V
主页
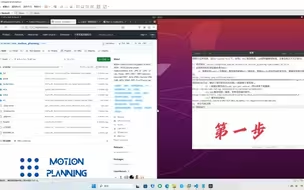
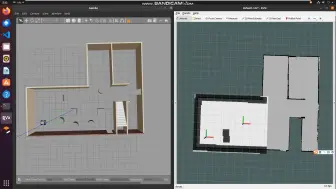
ROS Moveit机械臂仿真
发布人
从零到一搭建ROS Moveit机械臂仿真平台,有兴趣的同学可以跟着一起做。
打开封面
下载高清视频
观看高清视频
视频下载器
ROS-Gazebo-Rviz-轨迹规划与跟踪算法合集__01_LQR&A_Star
卡尔曼滤波在PID系统中的应用(源代码展示)
基于ROS的多车道道路环境下的车距保持与自主变道与超车
Ros1通过moveit、话题通讯和tf变换等操作实现安装d435i相机和夹爪的ur机械臂对空间中球体的定位与抓取
抽象的ROS课设
基于ROS通信的分布式多进程路径跟踪控制仿真系统
ROS 智能小车 未知地图自主导航建图 机器人导论大作业留档
ROS仿真 移动机器人导航 路径规划 运动控制
学妹的转弯大法大成(^ ^)叫我发个视频
HANDLER——基于YOLOv8及SLAM算法的智能家庭服务机器人
电机版Atlas的模型预测控制
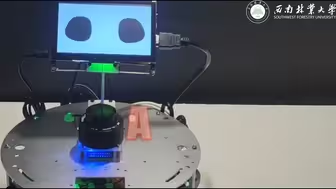
中國AI機器人仿生「微表情」🤖機械狗首現軍演❗️Made By China YYDS
工创机器人新品出炉
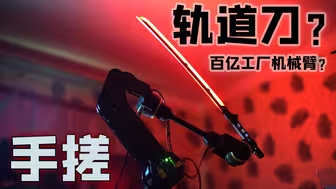
【手搓黑科技】是轨道刀,也是百亿汽车工厂的机械臂
波士顿动力:基于运动学,力,视觉信息融合实现物体状态估计
终于画出来咯
基于B样条和改进A*的避障
人形机器人“人里人气”深圳Citywalk,City不City?
波士顿动力:机器人和控制的机器学习中的归纳偏置
#二十天怒搓玩具狗 事实向我证明串联只是梦想,并联才是王道,我宣布:制式狗已统一四足领域
【手把手教做轮足机器人】1_概论和机械结构
还需要人干什么
ROS 颜色目标识别与定位的 C++ 实现
(开源)最迷你的ROS2 机器人,自动路径规划、视觉识别、人体检测跟随、手势识别控制、多形态切换(想要资料评论区留言安排!)
共轴双桨四旋翼设计
ROS 7.x 完美DDNS脚本 动态域名解析脚本 MikroTik RouterOS DDNS脚本
专家:这无人机得逼着策划人加班想新赛题了
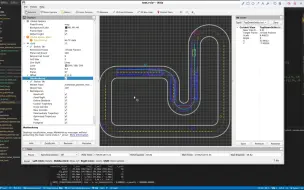
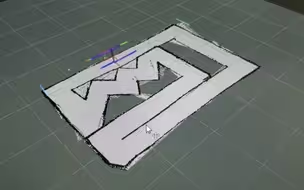
自制局部规划器 | 地图 racetrack_1
马斯克确认Tesla Optimus Gen 2的生产价格为1万美元!
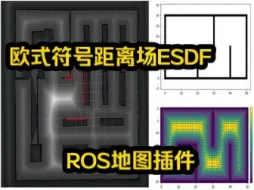
环境建模|欧式符号距离场ESDF的ROS地图插件实现
只需30秒,你竟然发明了机械臂
人形机器人灵活的关节
让无人机写书法高空作业误差低于3厘米
【手搓黑科技】随手做个世界一流智能车轮
FOLO-200自动跟随车:可承载100kg!!最强“拎包小弟”,你说city不city啊~
计算机是如何理解图像的
上海交通大学人工智能本硕生,在大厂工作的薪资情况。
RoboCup机器人日常调试
详解RouterOS的WireGuard隧道AllowedIP(AllowedAddress)多点隧道(多peer)篇