V
主页
京东 11.11 红包
《 MoveIt运动控制来了! 在抓取仿真平台上代码驱动UR抓取绝不止于想象!》
发布人
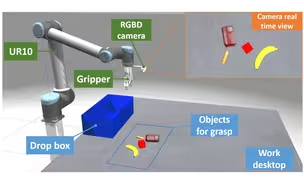
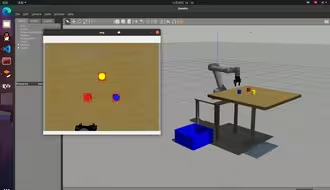
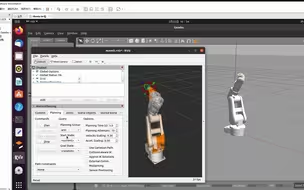
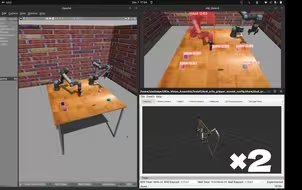
在这个视频中,我将继续向大家展示如何在ROS Melodic上利用Gazebo搭建UR机械臂抓取仿真平台,并且重点演示了最新的MoveIt运动控制部分的更新。这意味着通过编写代码,我们可以驱动机械臂执行精确而智能的抓取动作! 至此,仿真环境搭建告一段落。 Moveit与Gazebo接口配置参考: https://blog.csdn.net/qq_45695466/article/details/129080735 https://zhuanlan.zhihu.com/p/63229276
打开封面
下载高清视频
观看高清视频
视频下载器
【noetic+ur5+robotiq85+gazebo】ros机械臂 opencv 抓取仿真
moveit+gazebo联合仿真
ROS2+Gazebo双UR5e机械臂YOLOv5视觉抓取仿真
【ROS机械臂入门教程】第5讲-Gazebo仿真or控制真实机器人
【ROS机械臂入门教程】第4讲-Moveit!核心功能介绍及Rviz控制
MoveIt! ROS Tutorials (100% Practice)
【moveit开源+超简单】双臂机器人抓取物块实验
大学生ROS现状~RVIZ机械臂复现
Issac Sim机械臂追踪样例
ROS2+Gazebo双UR5e机械臂抓取
【ROS机械臂入门教程】第11讲-基于ROS-Moveit实现6-DOF视觉抓取
宇树Z1机械臂Gazebo仿真控制
《UR10推抓协同:复杂环境下的指定目标抓取》
手把手示范-->代码层次学习机械臂抓取仿真工程
基于机器人操作系统(ROS)和Gazebo仿真平台的机械臂强化学习抓取算法研究
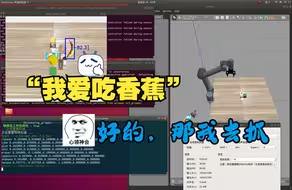
机械臂视觉语言抓取初步尝试--->请帮我抓香蕉
UR机械臂在gazebo仿真中推散物体分离场景
《场景生成:Gazebo中通过代码添加物体》
7.Moveit!机械臂控制
使用键盘调用MoveIt接口控制ur10机械臂(仿真和实机均可)
Yolov8算法驱动下UR5的自适应位置抓取
6DoF + PointnetGPD + Moveit + ROS机械臂的自主抓取
【开源课程】5分钟搞定机械臂开发和仿真环境,MoveIt!
【noetic+ur5+robotiq85+gazebo】ros机械臂固定点抓取仿真
《它又来了!编程展示精准抓取》
ROS Moveit桌面机械臂进阶视频教程(二)|Moveit_Setup_Assistant配置讲解
yolo+PointCloud+MoveIt+ROS机械臂自主避障抓取
踩了九九八十一个坑之后,第一次完整的的机器臂moveit和gazebo的联合仿真
机械臂执行推动作分散杂乱场景(人为点击版)
Gazebo中UR5机械臂视觉抓取任务仿真
基于ROS搭建仿真环境——A ROS based Open Source Simulation Environment
UR机械臂学会理解人类语言,实现目标物体的推抓协同
基于Moveit与yolov5的gazebo仿真(开源填坑)
交互玩ROS:ChatGPT与机器人合作解决任务的初次尝试
【机械臂入门教程】机械臂视觉抓取从理论到实战
抓取不止!Ubuntu 18.04下UR5机械臂搭建Gazebo环境|开源分享
ROS机械臂教程《如何基于MoveIt开发一款机械臂》
智能观察、自主抓取,桌面整理就是如此酷炫!
Grasp-Anything:利用大模型生成的大规模机械臂数据集
issac sim carter_2d ros navigation例子