V
主页
TinyMPC model-predictive-control-on-resource-constrained-microcontrollers
发布人
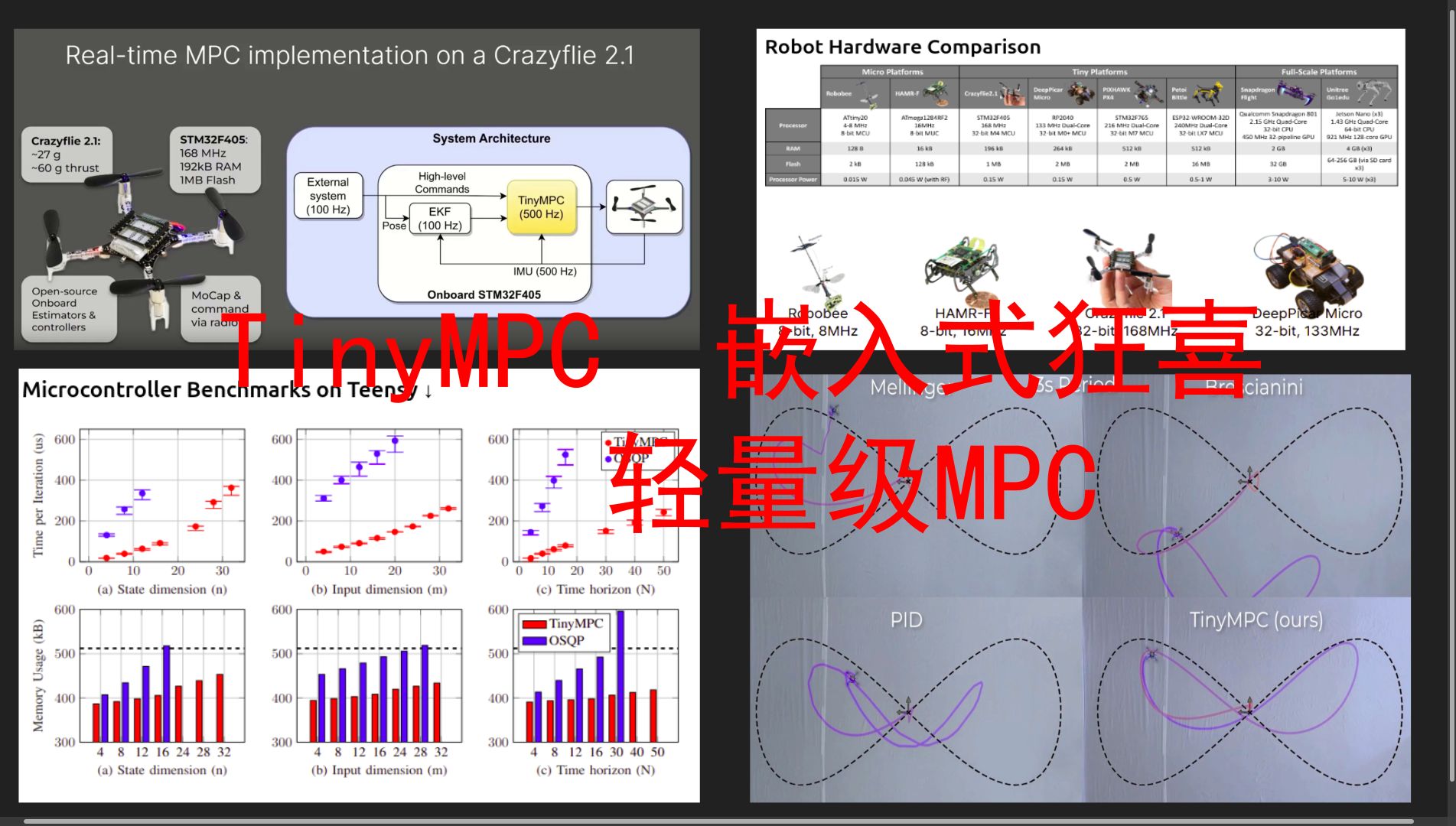
非常好用,速度很快,强烈推荐,嵌入式福音啊! 欢迎关注,点赞,持续分享!代码仓在简介末尾哦 下面是论文: TinyMPC: Model-Predictive Control on Resource-Constrained Microcontrollers Model-predictive control (MPC) is a powerful tool for controlling highly dynamic robotic systems subject to complex constraints. However, MPC is computationally demanding, and is often impractical to implement on small, resource-constrained robotic platforms. We present TinyMPC, a high-speed MPC solver with a low memory footprint targeting the microcontrollers common on small robots. Our approach is based on the alternating direction method of multipliers (ADMM) and leverages the structure of the MPC problem for efficiency. We demonstrate TinyMPC both by benchmarking against the state-of-the-art solver OSQP, achieving nearly an order of magnitude speed increase, as well as through hardware experiments on a 27 g quadrotor, demonstrating high-speed trajectory tracking and dynamic obstacle avoidance. https://tinympc.org/docs/ https://arxiv.org/abs/2310.16985 https://github.com/TinyMPC/TinyMPC https://www.youtube.com/watch?v=NKOrRyhcr6w&t=36s
打开封面
下载高清视频
观看高清视频
视频下载器
Contact-Implicit MPC: Controlling Diverse Quadruped Motions Without Pre-Planned
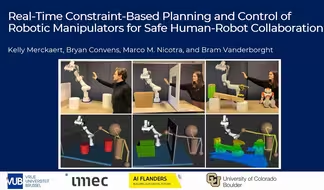
Real-Time Constraint-Based Planning and Control of Robotic Manipulators
MPC and RL, two different roads to legged locomotion, and that's OK
模型预测控制 (MPC) 从推导到C++ 实现,详细教程 仅使用 Eigen 库 代码在简介
(ICRA 2024) Actor-Critic Model Predictive Control
[23 RAL]利用实时非线性 MPC 实现双足运动的无缝反应策略
Boston Dynamics Atlas好矮啊
ICRA 24 Convergent iLQR for Safe Trajectory Planning and Control of Legged Robot
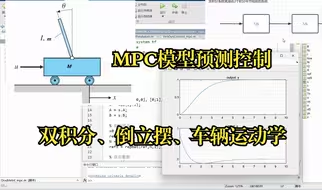
MPC模型预测控制仿真实现(双积分、倒立摆、车辆运动学跟踪控制)
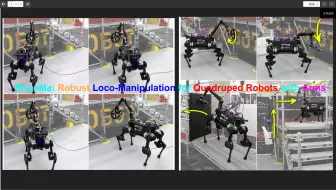
RoLoMa: Robust Loco-Manipulation for Quadruped Robots with Arms
(Humanoid)An IntegratedForceSensitive, Impedance Controlled, Tendon-Driven Wrist
[复现]基于李雅普诺夫的模型预测控制MPC水下机器人AUV方法路径跟踪
The legged robot whole-body State RVIZ plugin
Whole-body MPC for highly redundant legged manipulators
(RA-L 24)Dynamic Mobile Manipulation via Whole-Body Teleoperation of a Humanoid
Inverse-Dynamics MPC via Nullspace Resolution (IROS'23 Presentation)
ETH 最新RL成果,已开源!SMUG 规划器:适用于具有挑战性环境下的移动机器人的安全多目标规划器
High-Power, Flexible, and Robust Musculoskeletal Hand (IROS 2017)
四足机器人足臂协同 ocs2 qm_control 开源项目学习
ETH最新论文 重新思考鲁棒性评估: 基于学习的四足运动控制的对抗性攻击
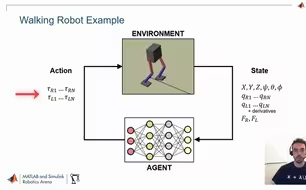
双足机器人的深度强化学习- MATLAB and Simulink
Deep Compliant Control for Legged Robots
基于MPC模型预测控制的四旋翼路径跟踪仿真设计(状态空间模型)
ETH 最新Science Robotics基于学习的轮腿机器人自主导航和运动
(ICRA 24) Quadruped-Frog: Rapid Online Optimization of Continuous Quadruped Jump
Curiosity-Driven Learning of Joint Locomotion and Manipulation Tasks
基于分层优化的四足机器人全身运动控制搬运重物
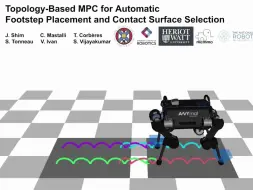
Topology-Based MPC for Automatic Footstep Placement and Contact Surface Selectio
[24 T-RO]Hybrid iLQR MPC for Contact Implicit Stabilization on Legged Robots
Impact-Aware Bimanual Catching of Large-Momentum Objects
新版STM32从入门到精通全套视频教程(59集全)
Reinforcement learning for blind stair climbing with legged and wheeled robot
Real-time Model Predictive Control with Zonotope-Based Neural Networks for Biped
IROS 2020 Teaser · Dynamic Trajectories Robust to Disturbances
An Efficient and Versatile Framework for Multi-Contact Optimal Control
Consensus Complementarity Control for Multi-Contact MPC
Sampling based path replanning
人形机器人腿部结构 基于 4DoF 球面并联机构
[IROS 2022] 四足机器人通过端到端学习运动和局部导航来掌握高级技能
[24 RA-L] 摆动速度超快!一种适合足式机器人快速摆动的腿部结构, 很巧妙!