V
主页
京东 11.11 红包
【ICRA2021】3711-TaskNet:一种用于自动挖掘机的神经任务规划器
发布人
我们提出了一种基于数据驱动方法的自主挖掘机任务规划器-TaskNet,它通过学习演示数据来规划可行的任务级序列。给定一个高级挖掘目标,我们的TaskNet规划器可以将其分解为子任务,每个子任务都可以进一步分解为带有规范的任务原语。我们使用挖掘轨迹生成器训练TaskNet,并使用基于3D物理的地形和挖掘机模拟器评估其性能。与基于模仿学习的方法相比,实验结果表明TaskNet可以有效地学习任务分解策略。所得到的任务基元序列可以用作任何挖掘机运动规划器的输入,用于生成可行的关节级轨迹。我们在最先进的自
打开封面
下载高清视频
观看高清视频
视频下载器
【ICRA2021】3731-用于大规模勘探任务的弹性高效激光雷达重建
【ICRA2021】移动机器人 3D 三角形网格上的连续最短路径矢量场导航
【ICRA2021】LiDAR和相机的基于线的自动外部校准
【ICRA2021】4081-一种集成波束形成映射的FastSLAM方法用于基于超声波的金属结构机器人检测
【ICRA2021】使用快速可见树的实时机器人路径规划
【ICRA2021】PHASER:一种无需对应的鲁棒全局点云配准
【ICRA2021】3531-在未知环境中学习和规划临时扩展任务
【ICRA2021】3988-大尺度环境严重里程计漂移下自主体积探测的统一方法
【ICRA2021】4028-移动机器人全局-局部耦合两阶段路径规划方法
【ICRA2021】CAROM - 道路基础设施单目相机的车辆定位和交通场景重建
【ICRA2021】LiDARNet:用于点云语义分割的边界感知域适应模型
【ICRA2021】面向鲁棒机器人计划的伴随感知和行动方案和交错任务规划
【ICRA2021】3602-移动机器人导航的终身学习方法
【ICRA2021】UVIP:用于复杂室内环境的强大的 UWB 辅助视觉惯性定位系统
【ICRA2021】用于自动代客泊车的基于混合鸟瞰边缘的语义视觉 SLAM
【ICRA2021】强度SLAM:大规模环境的强度辅助定位和建图
【ICRA2021】3756-远程类车车辆的触觉引导路径生成
【ICRA2021】APPLI:从干预中学习自适应规划器参数
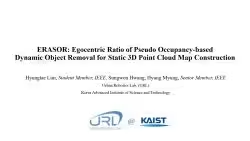
【ICRA2021】3508-ERASOR:一种基于栅格占据情况之差异的动态物体过滤方法
【ICRA2021】快速高效地探索大型复杂环境
【ICRA2021】3794-学习使用各种LiDAR配置进行无地图导航:一种基于支持点的方法
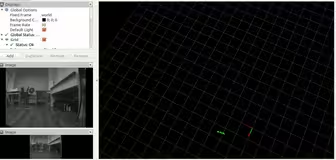
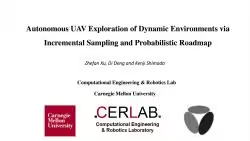
【ICRA2021】3767-通过增量采样和概率路线图对动态环境进行自主UAV探索
【ICRA2021】RELLIS-3D 数据集:数据、基准和分析
【ICRA2021】3696-负障碍导航的虚拟表面和姿态感知规划与行为
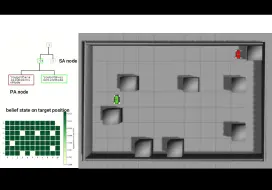
【ICRA2021】3997-闭塞和不确定环境下安全自主导航的可视性谈判
【ICRA2021】CABiNet:用于低延迟语义分割的高效上下文聚合网络
神经网络杀疯了,登上nature:35年首次被证明具有泛化能力,能像人类一样思考!人工智能/机器学习/神经网络/深度学习/计算机视觉
【ICRA2021】在不可预测的环境中使用遗传编程学习行为树
最好出论文idea的两大方向:GNN图神经网络+Transformer模型,三小时可掌握各变体基础原理及代码实战,讲的是真的通俗易懂!
【ICRA2021】相机IMU UWB的距离聚焦融合用于精确和减少漂移的定位
【ICRA2021】LIRO:紧耦合激光雷达惯性里程计
【ICRA2021】来自范围和语义分割观察的主动贝叶斯多类别建图
【ICRA2021】3518-在不利环境条件下使用轻型、低成本毫米波雷达导航的表示的跨模态对比学习
【ICRA2021】分层驾驶模型的模仿学习:从连续意图到连续轨迹
【ICRA2021】3485-R-LOAM:利用已知三维参考对象的点到网格特征改进激光雷达里程计建图
【ICRA2021】稳健 RGB-D SLAM 系统的多参数优化
【ICRA2021】FG-Conv:大型 LiDAR 点云理解利用特征关联挖掘和几何感知建模
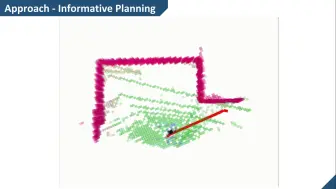
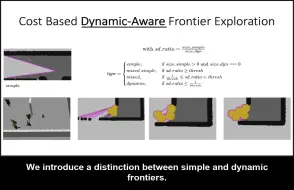
【ICRA2021】人口密集环境中的动态感知自主探索
【ICRA2021】CodeVIO:具有学习优化密集深度的视觉惯性里程计
【ICRA2021】机器人远程操作与工作负载管理的多资源理论设计原理研究