V
主页
京东 11.11 红包
MetaAI开源具身智能平台Habitat 3.0:社交智能机器人之路|2023【MetaAI】
发布人
Blog:https://ai.meta.com/blog/habitat-3-socially-intelligent-robots-siro/ 论文:https://ai.meta.com/static-resource/habitat3 代码:https://github.com/facebookresearch/habitat-lab
打开封面
下载高清视频
观看高清视频
视频下载器
具身智能新思路———Diffusion Policy 结合 PPO 模仿+强化 (上)
具身智能常用AI工具-必看
今天把我做的这个机械臂开源
NVIDIA Robotics:从自动驾驶到人形机器人|2024【英伟达】
PUDU D7!普渡机器人的第一代半人形具身智能黑科技~
开源低成本遥操作系统:学习精细的双手遥操作|2023【斯坦福大学】
机器人角色运动学优化设计|2023 ACM SIGGRAPH【迪士尼】
运动规划:利用凸优化绕过障碍|2023|Science Robotics【MIT】
SELDA驱动的机器人腿跳跃|2022【IROS】
人形机器人:自监督学习的傅里叶潜在动力学|2024【MIT】
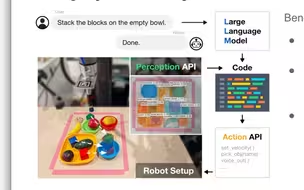
代码作为策略: 用于具身控制的语言模型程序|2023【Google】
机器人从人类活动和模拟交互的视频中学习|2023【metaAI】
Diffusion Policy 结合 PPO 模仿+强化 (下)
飞龙机器人:空中机器人实现了工业阀门操作|2022【東京大学】
loco-mujoco:MuJoCo模仿学习复杂运动任务|2023【德国达姆城工业大学】
无需真实机械臂也可以训练具身大模型!通过Robostudio的R2S2R工具链来采集训练和部署机器人策略
这只机器狗成精了 | 像人一样爬梯子 | 欧洲最强机器狗 ANYmal | 具身智能 | 神经网络 | 人工智能 | 四足机器人
LINQ:基因组学实验室自动化解决方案|2023【英国Automata】
Hello Robot:第三代Stretch 3|2024【Hello Robot】
MetaUrban:城市环境中的具身人工智能模拟平台|2024【加州大学洛杉矶分校】
人形机器人学习跑酷|2024【上海科技大学】
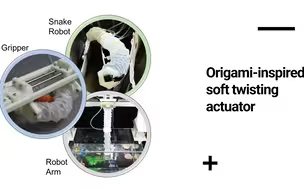
折纸结构启发的软扭转致动器|2022|SoRo【南方科技大学】
自监督对抗性模仿学习多种控制技能|2023【德国马普智能系统研究所】
【热门资讯】埃隆·马斯克对人工智能发展、人口趋势和机器人技术的前瞻性观点
VLFM:零样本语义导航|2024 ICRA【波士顿动力AI研究所】
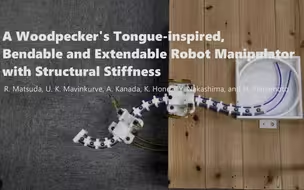
啄木鸟启发的机械手|2022【日本九州大学】
DTC:Deep Tracking Control深度跟踪控制|2024|Science Robotics【苏黎世联邦理工学院】
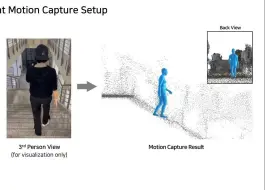
开源动捕:头戴式摄像头+智能手表|2024【首尔国立大学】
智能多臂苹果采摘机器人|2024【Tevel&advanced.farm】
Spot安全响应解决方案|2024【Boston Dynamics】
本科生感兴趣科研|研0研1|导师放养|卷不出头|找不到切入点,怎么上手具身智能?
ViPlanner:用于局部导航的视觉语义学习 |ICRA 2024【苏黎世联邦理工学院&英伟达】
MyoSuite:统一神经和运动智能的具身AI平台|2022【Meta】
UBTECH类人机器人Walker S1:满足工业场景中的通用化需求
机器人大语言模型综合技能学习:从语言到奖励|2023【Google】
模块化自主复杂环境构建|2023【美国ExynAI】
机器人跑酷学习|CoRL 2023【上海期智&斯坦福】
PAPRAS:即插即用机械臂系统|2023【伊利诺伊大学厄巴纳-香槟分校】
Upside Down:低成本高性能运动平台|2023【德国马普所】
Solo四足机器人学习多技能局部导航|2024 ICRA【马克斯·普朗克智能系统研究所】