V
主页
crocoddyl足式接触机器人优化控制软件例子演示
发布人
crocoddyl 的python版本安装指令—— pip install --user crocoddyl 更多软件理论也代码讲解课程—— https://www.bilibili.com/cheese/play/ss9959?bsource=link_copy
打开封面
下载高清视频
观看高清视频
视频下载器
开源库,4款人形机器人MPC控制的开源库
简单入门的whole body MPC人形机器人控制
人形机器人MPC控制案例
Whole body MPC 在线实时,只需要 15ms
公开课--基于优化的机器人控制(2),机器人建模、接触模型,足式机器人建模方法,人形机器人
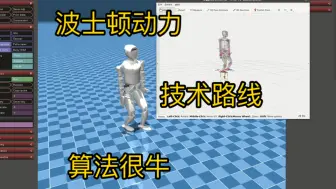
终于走上波士顿动力的技术路线了,算法很强,软件很难调。ocs2质心动力学MPC+WBC,6自由度的腿也调好了,加上了碰撞约束,参数还没细调,能够行走1m/s多。
【开源软件】MPC控制,有机械狗、机器人、机械臂、倒立摆的模型,非常方便大家学习控制和机器人技术的,推荐给大家使用
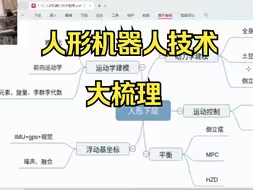
梳理人形机器人——底层技术
【镜像开源】pinocchio、crocoddyl 可视化工具,镜像里已经安装好了,链接见简介
耗时一个月,终于把人形机器人技术给突破了,为了积攒创业资金,准备开通咨询和技术合作,有需要可以联系我
【经验】机器人入门3--就业情况
好理解 优化控制LQR,黎卡提方程,哈密顿函数
通俗理解 , 李亚普洛夫稳定
通俗易懂,入门非线性控制,通过几何思维看控制系统
一个简单的状态反馈控制
网友搞出世界最小开源端到端人形机器人,极简DIY成本仅2500
ocs2的6自由度终于调出来了,目前仅仅是质心动力学mpc的效果,还没加碰撞的约束,两脚打架了,后面会逐步加wbc,加上身
【经验】机器人入门系列1--个人经历
基于Crocoddyl搭建的ROS机器人仿真,40公分跳跃,实时whole body MPC控制
马斯克的人形机器人到底能否大批量生产
公开课--基于优化的机器人控制(4),ZMP人形机器人步态规划,LIPM线性倒立摆建模,人形机器人行走
写了一个人形机器人仿真,适用5或者6自由度的腿形
不积跬步,无以至千里;不积小流,无以成江河。再大的目标也要脚踏实地,一步一个脚印去做,不要好高骛远,急功近利……
机器人控制前言,不要再花时间调参数了,理论结合实践才能出产品
55个非常有意思的“机器人”网站,从几千个网址里筛选出来的
人形机器人究竟怎么样?还得听国家讲
华为下场,盘点国产人形机器人4家核心公司
控制实践-simulink仿真在控制的应用
chatGPT自己能写代码控制机器人吗?google的一个研究,感觉很有趣啊!
机器人控制论文里常见的矩阵微分
【开源软件-安装篇】MPC控制,有机械狗、机器人、机械臂、倒立摆的模型,非常方便大家学习控制和机器人技术,推荐给大家使用
人形机器人上层、系统与工程难点
运动学、动力学Matlab代码,Roy Featherstone开源的程序,还有russ tedrake教授的研究,可以参考他们的来写
AI奇点说 | 第九期:未来走进现实,机器人开始“上岗”你准备好了吗?
机器人控制,自动控制的本质下,把握本质能够快速解决问题
MIT humanoid9月最新的whole-body NMPC,基于ADMM方法,稳定太强了
人模人样----为了让人形机器人走的更像人,设计了一些机器人轨迹,目前只有下半身,展示的是轨迹的可视化
人类搬运工的终结者?波士顿Atlas机器人自我纠错、自主操作相当惊艳
经验|研究机器人,不要面面俱到
状态转移矩阵及离散化