V
主页
比赛冠军方案!英伟达最新 | Hydra MDP:端到端多模态规划
发布人
冠军方案!英伟达最新 | Hydra MDP:端到端多模态规划,原文链接:https://arxiv.org/pdf/2406.06978,本文提出了Hydra MDP,这是一种在师生模型中使用多个教师的新范式。这种方法使用来自人类和基于规则的规划有限监督感知GT日志回放教师的知识提取来训练学生模型,该模型的特点是使用多头解码器来学习根据各种评估指标定制的不同候选轨迹。凭借基于规则的教师的知识,Hydra MDP了解环境如何以端到端的方式影响规划,而不是诉诸于不可微分的后处理。该方法在Navsim挑战赛中获得第一名,证明了在不同驾驶环境和条件下的泛化能力有了显著提高。
打开封面
下载高清视频
观看高清视频
视频下载器
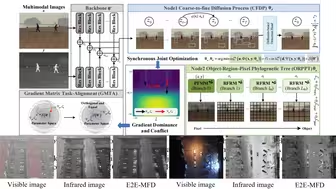
NeurlPS 2024 Oral | E2E-MFD 迈向端到端同步多模态融合检测 为智驾实现同步优化与性能提升
上交&诺亚最新 | 大幅提升!OccGen:面向自动驾驶的生成式多模态3D占用预测
英伟达冠军方案!Hydra-MDP:多模态端到端自动驾驶详解
PLUTO算法详解:端到端首次超越基于规则的方法
TPVFormer:特斯拉occupany network的学术替代方案!清华大学工作
端到端数据格式是什么样的?快来看看吧
UC伯克利最新!S3Gaussian:全球首个开源的自动驾驶场景3D GS工作
地平线VAD又又又上新了!VADv2比v1强在哪里?一起来听
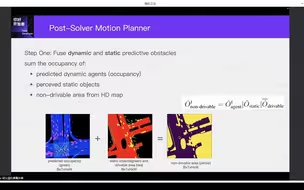
香港科技大学最新!MARC:自动驾驶的多极和风险意识应急计划
Waabi最新!UnO:用于感知和预测的SOTA模型(超越监督方式)
NeurlPS'24开源 | RealMotion捕捉时空交互关系,为自动驾驶提供连续、精准的运动预测
英伟达最新!NeRF XL:将NeRF分布到多个GPU扩展,对任意大容量的NeRFs进行训练和渲染
轨迹规划新方案!基于差分平坦度的自动驾驶车辆轨迹规划
LeTS-Drive:自动驾驶中不确定场景下的实时路径规划算法
特斯拉的World Model是什么?怎么做端到端训练?
冠军!英伟达荣获CVPR端到端自动驾驶挑战赛第一名
上海AI Lab最新!Depth any Video:提升深度估计的一致性以及合成更多真实带有标注的数据
CVPR2023 Nuplan自动驾驶轨迹规划比赛第二名方案详解
【全网首讲】大佬开讲:我们是否走在开环端到端自动驾驶正确的道路上?
ICRA 2024 | 轨迹规划的终极状态
自动驾驶中的多传感器融合都有哪些方法?基本流程都是什么?
英伟达最新!SCube:仅用三张图,就能实现即时大规模三维场景重建
CVPR2024最新BEV-Planner:Ego Status对于开环端到端自动驾驶的影响有哪些?
港科大最新!Vista:高保真度、通用可控性的自动驾驶世界模型
英伟达提出EmerNeRF:大规模动态自动驾驶场景重建
为什么说规划控制仍然是端到端自动驾驶的核心?全面复盘规划控制基础及决策规划框架
牛津大学IROS2023最新!激光雷达相机外参标定新算法(大幅降低误差)
轨迹预测到底预测个啥???轨迹预测入门必备!
大模型时代下的端到端自动驾驶(上篇)
解决自动驾驶长尾问题,DOME模型结合扩散和OCC技术打造超真实世界模型
清华大学&英伟达 | DriveEnv-NeRF:基于NeRF实现高逼真自动驾驶场景,离线测试!
多模态3D检测相关2D和3D感知基础知识
VastGaussian:首个基于3D Gaussian Splatting的大场景高质量重建和实时渲染方法
2023不容错过!详解自动驾驶的Pipeline
从轿车到SUV | 英伟达通过动态视图合成的不断突破!
自动驾驶规划控制的未来是什么?
【地平线×自动驾驶之心】在线高精矢量化地图构建SOTA方案MapTR v1/v2、LaneGAP
终生SLAM框架!BioSLAM:用于一般地点识别的仿生终身记忆系统
太详细了!多传感器融合的策略和方法
太强了!RenderOcc:仅使用2D标签和Nerf监督视觉Occupancy