V
主页
浙大&阿里:用于自动驾驶的大规模神经场景渲染 [AAAI2023]
发布人
https://www.youtube.com/watch?v=2yeH7l4oLYw 本文提出一种高效的自主驾驶神经场景渲染方法,通过各种采样方案,使在PC上合成大尺度的场景成为可能。提出一个 - 渲染网络,通过基本门模块过滤神经描述符,并在同一尺度和不同尺度上用不同策略融合特征。所提出方法不仅合成了照片般真实的视图,而且还对驾驶场景进行了编辑和拼接。能够生成各种照片般真实的图像来训练和测试自动驾驶系统。实验结果表明,所提出的方法在质量上和数量上都明显优于其他方法。
打开封面
下载高清视频
观看高清视频
视频下载器
UE4-NeRF的神经渲染系统,专为实时渲染而设计的大型场景
浙大&商汤最新研究:构建时空记忆力,用于提升3D对象检测和跟踪
基于神经网络自由视点场景快速、高质量渲染,效果大幅领先现有算法!(代码开源)
神经辐射场照亮动态SLAM:构建精细场景地图
广角、超广角和长焦镜头的多摄像头超分辨率合成,1080P变8K视频
清华大学:OcclusionFusion:遮挡感知运动估计的实时动态3D重建
自驾场景 快速训练!CarDreamer:首个开源世界模型自动驾驶平台
CVPR2023:不使用任何3D数据标签,零样本学习3D场景理解
用于场景渲染的几何感知高斯抛雪球算法
牛津VGG团队最新开源!Flash3D:一张图像重建整个3D场景!通用性超强!
英伟达-OmniDrive:基于稀疏查询的三维自驾VLM框架
自动驾驶中实战课之Lidar与IMU的同步实战
香港大学工作!CVPR2022:事件相机的自动对焦
20+FPS!最新开源!加上回环检测的NeRF SLAM竟是如此精确!
AI大事件:字节跳动全新项目Loopy惊艳登场!AI出题工具他来了!
MIT重磅开源!别再用COLMAP了!FlowMap给你最精确的SfM!
CVPR2022 基于神经网络的3D重建
【新芽结业汇报】DIP、NeRF 与 3DGS:自监督式图像处理及3D场景渲染
107 FPS!开源!结合ICP和3D GS构建最快的稠密SLAM!
[CVPR2022] ICG:融合区域和深度以实现无纹理对象的高效3D跟踪
自动驾驶中的深度学习模型部署实战-数据预处理NPP库介绍及CUDA编程模型之线程操作
自从学会抄,一年轻松发6篇SCI!B站公认最好的【SCI论文写作教程】26讲全!基本套路+实操演示,包含所有干货内容!-论文/SCI论文/毕业论文
[IROS2021] TUPPer-Map:用于 3D 语义建图的时间和统一全景感知
高通提出无监督和跨单元部署的实时、准确、一致的视频语义分割
3DGS SLAM最新SOTA | 使用视觉、深度和惯性测量进行SLAM的多模态3DGS
UE5虚幻卡通场景地编制作-风格化场景渲染
CVPR 2021 HPS:无需外部传感器,大场景、长时间的动作捕获系统
斯坦福团队EquiBot:仅用 5 分钟演示,机器人就能学会日常操作
Transformer模型结构
CVPR'24 Symphonies:基于实例级建模的3D场景占用
WACV2023:基于结构光的RGB事件相机(代码开源)
CVPR2022 浙大开源,NICE-SLAM:一种隐式神经可扩展编码 RGB-D SLAM
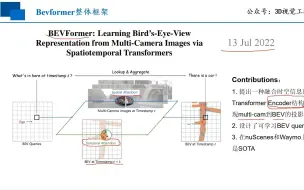
BEVFormer:时空transformer架构
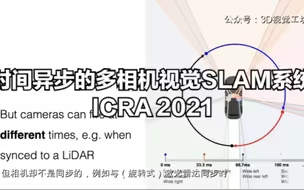
ICRA2021,时间异步的多相机视觉SLAM系统,效果大幅提升,更符合实际情况(代码即将开源)
视觉快速定位与实时稠密简图简介
SCIROBOT2023 港大开源一种用于自主导航的具有扩展传感器视场的自旋转单驱动无人机!
【组会救星】CVPR 2024 目标检测领域重大突破!
厦门大学:使用可穿戴 IMU和LiDAR的大规模室内外4D场景捕获
速度提升10倍以上!Depth Anything V2更稳健、精细的单目深度估计
神经网络杀疯了,登上nature:35年首次被证明具有泛化能力,能像人类一样思考!深度学习/机器学习/人工智能