V
主页
IROS 2020 Tutorial - 旋量理论与几何机器人动力学
发布人
https://www.iros2020.org/ondemand/workshops?id=TS-2388&id2=More%20Tutorials IROS 2020 Tutorial on Review on Screw Theory & Geometric Robot Dynamics
打开封面
下载高清视频
观看高清视频
视频下载器
(2017) Nonlinear Control Systems
IROS 2020 Workshop - 几何方法在机器人学习,优化与控制中的应用
4.8路人转米卫兵全过程
如何将一个矩阵或者矢量作为指数?群论完结篇:李代数
电量快用完的AI酱,居然开始变得娇羞起来了?
IROS 2020 Workshop - MIT MiniCheetah
指数运算全景:从简单函数到向量场的扩展
发明咬人玩具的人真是个天才,它是如何做到纯机械随机触发的
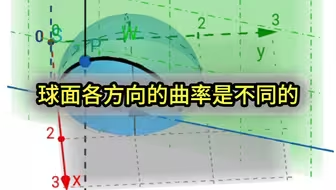
妈呀,球面各方向的曲率竟然是不同的?
IROS 2020 Tutorial - 机器人状态的深度表示与状态估计
原神5.0前瞻直播一片祥和,太一之梦
微分几何全新观念:矢量并不能表示曲面上的方向?
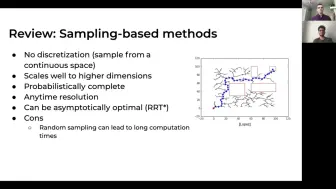
Introduction to Trajectory Optimization
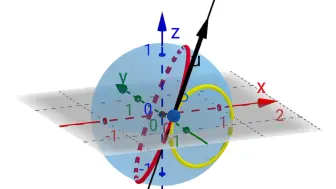
如何描述任意角度的旋转,群可以被看成一个几何体吗?群论09:李群
IROS 2020 Workshop - 基于约束的机器人编程
ACADO 自动微分与优化
跟风买回来了机器人美少女,居然还是傲娇型?
MoveIt! ROS Tutorials (100% Practice)
数值优化—Numerical Optimization
第一次见过能翻粮食的机器人
【CC字幕】Robotic Manipulation at MIT
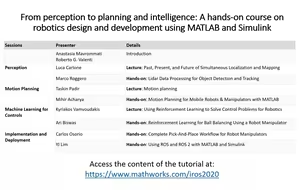
IROS 2020 Tutorial - From Perception to Planning and Intelligence
Deep Reinforcement Learning CS 285 Fall 2020 at UC Berkeley
【CC字幕】卡内基梅隆大学飞行器实验室暑期学校(2020)
非线性波 - 教程
基于导纳的LBR/iiwa末端柔顺控制
微分几何全新观念:关于广义方向曲率的探索
Russ Tedrake (欠驱动与足式机器人领域大佬) 讲座合集
Blender使用建模和油脂画笔制作可爱的卡通动画
微分几何全新观念:最大最小方向曲率的方向是互相垂直的?
什么是李群理论? || 矩阵变换、对称性、李括号运算.
Numerical Optimal Control at University of Freiburg
”幸好我是廉价的机器人,不然我就不能遇见拓馬先生了“
人机战士最逆天的一集
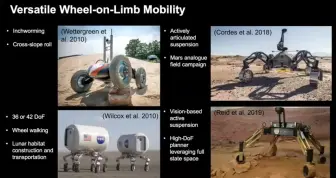
IROS 2020 Workshop on Planetary Exploration Robots
人模人样----为了让人形机器人走的更像人,设计了一些机器人轨迹,目前只有下半身,展示的是轨迹的可视化
基于自适应变阻抗的LBR/iiwa末端接触力跟踪
来简单认识曲面的曲率和切平面和法线n
【科普讲座】人类数学直觉的诞生与发展
Programming for Robotics at ETH