V
主页
SLAMesh: 基于Mesh地图的实时LiDAR定位与Mesh建图方法分享
发布人
自动驾驶之心联合计算机视觉life举办一场LiDAR SLAM盛宴。特邀浙江大学和香港理工大学的阮建源博士分享SLAMesh: 实时LiDAR定位与Mesh建图方法。
打开封面
下载高清视频
观看高清视频
视频下载器
港大ArcLab重磅开源LVI-GS:3DGS紧耦合LiDAR-视觉-惯性SLAM!实时照片级建图!
LeTS-Drive:自动驾驶中不确定场景下的实时路径规划算法
牛津大学IROS2023最新!激光雷达相机外参标定新算法(大幅降低误差)
终生SLAM框架!BioSLAM:用于一般地点识别的仿生终身记忆系统
fastlio建图与自主导航演示
2022最新!Nvidia完整阐释自动驾驶中的视觉感知(超赞技术)
《ROS 2机器人开发从入门到实践》7.2.1构建第一章导航地图
视觉SLAM进阶-从零开始手写VIO
如何从手持SLAM数据到MESH网格
【空间计算】VIOBOT2 室内 定位 导航【里程计】【实测】
不再依赖RGB-D!NICER-SLAM:一个密集的RGB SLAM系统
在线高精地图与城市NOA是什么关系?为什么如此重要?
GPS+IMU+3D激光建图
【ECCV2022】SOTA!MeshLoc:基于网格的视觉定位
自动驾驶汽车是如何在高精地图中建立精确位置的?
【ICRA 2023 | 首篇研究LiDAR基础设施部署的工作!作者亲自带你玩转传感器部署策略】第3节:车路协同场景激光雷达部署策略优化方法
香港科技最新!Contour Context:3D激光雷达回环检测和度量姿态估计的抽象结构分布(ICLR2023)
量产基石!MapTR:在线高精地图经典开山之作
太详细了!多传感器融合的策略和方法
超越Lidar?聊一下4D Radar在自动驾驶中的优势和应用!
CVPR 2023 | OrienterNet:基于神经匹配的2D公共地图视觉定位
22年十佳开源SLAM算法
IROS2022 | 我们准备好进行鲁棒且有弹性的SLAM了吗?
港科技最新SLAM数据集!SLABIM:香港科技大学主楼SLAM-BIM耦合数据集
要啥激光雷达,2D、2.5D、3D地图我全都有,Factor Perception SDK纯视觉SLAM地图数据展示
基于NVIDIA Isaac Sim和LIO-SAM的激光SLAM demo
小小的调试一下
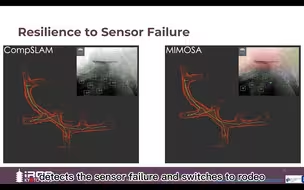
【IROS 2022】多模态SLAM框架MIMOSA:一种针对传感器退化的弹性自治多模态SLAM框架
香港大学最新!ROG-map:高效的以机器人为中心的占用网格地图
搞懂了!原来激光雷达和相机的内外参是这样标定的
车道线方案第一名!OpenLane Topology自动驾驶挑战赛(CVPRW2023)
港科技最新LiDAR建图方案 | SLIM:城市环境中可扩展和轻量级的LiDAR建图
【IROS2022】MPC-PF:使用势场的自动驾驶动态目标的社会交互感知轨迹预测
毫米波雷达视觉算法CRAFT,这次彻底理解了!
还在为数据集发愁?!带你了解自动驾驶常见数据集哪里找!
【全网首讲】大佬开讲:我们是否走在开环端到端自动驾驶正确的道路上?
自动驾驶规控工程师必备技能点!Coupling Trajectory Planning是个啥?
点云地图中的重定位
定位误差小于20cm!MT F-CVT:增强泊车区域感知
通过Intel Realsense 3D激光雷达完成SLAM任务!(性价比超高)