V
主页
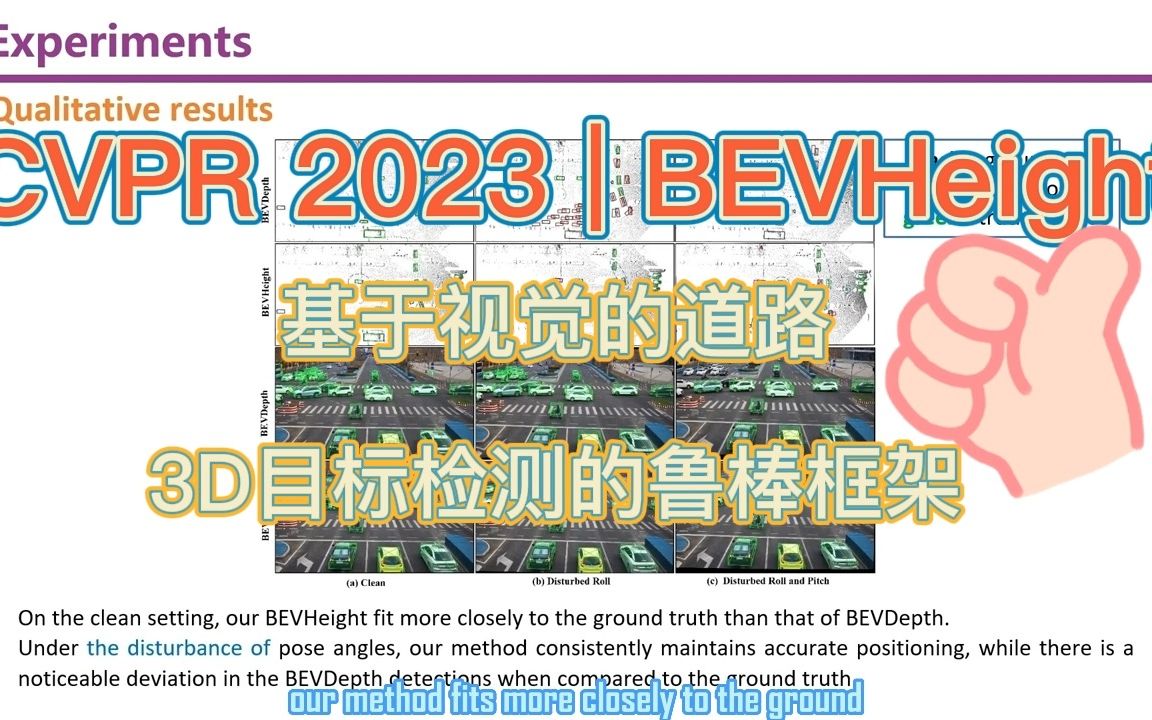
CVPR 2023 | BEVHeight:基于视觉的道路3D目标检测的鲁棒框架
发布人
https://www.youtube.com/watch?v=W-y-MIrdXQc&ab_channel=%E6%9D%A8%E7%A3%8A 论文链接:https://arxiv.org/abs/2303.08498
打开封面
下载高清视频
观看高清视频
视频下载器
直播分享!最新SOTA,多模态3D目标检测新方案(CVPR2023)
CVPR 2023:VoxelNeXt:用于3D目标检测和跟踪的全稀疏新框架!
来听大牛说!赵行老师在CVPR 2023年自动驾驶研讨会上发表的演讲
车道线方案第一名!OpenLane Topology自动驾驶挑战赛(CVPRW2023)
视觉3D检测如何做自动标注?
世界模型!特斯拉CVPR2023 Workshop!
CVPR 2023 | Mask DINO:面向检测和分割的统一Transformer最强框架!
CVPR 2023 | OrienterNet:基于神经匹配的2D公共地图视觉定位
大火的BEVFusion算法详解
CVPR2022 | MeMOT:具有记忆的多目标跟踪
地平线最新SOTA!Sparse4D:迈向长时序稀疏化3D目标检测的新实践
使用YOLOv4完成激光雷达点云下的3D目标检测!
【IROS2022】MPC-PF:使用势场的自动驾驶动态目标的社会交互感知轨迹预测
CVPR 2023 | 通过点云预测作为4D Occupancy 预测的代理
CVPR'23 | OCTraN:非结构化交通场景中的3D占用卷积Transformer网络
牛津大学最新!室内室外SOTA | 用于视觉重定位的地图相对姿态回归(CVPR'24 HighLight)
CVPR 2023 | INSTA: 实时3D头像重建
多模态3D检测相关2D和3D感知基础知识
2022最新!基于激光雷达的3D目标检测综述(超全数据集和SOTA方法汇总)
R3LIVE++:一个实时鲁棒的紧耦合激光雷达-惯性-视觉融合框架
激光雷达3D目标检测算法有哪些?怎么分类的?
毫米波雷达视觉算法CRAFT,这次彻底理解了!
端到端算法是什么?自动驾驶领域是怎么做的?
ICCV2023 | MPOT:多平面目标跟踪
KITTI SOTA!即插即用,单目3D检测中的单应性损失!(CVPR2022)
跟知乎大V一起来学BEV!视觉BEV感知和跟踪算法详解
冠军分享!QCNeXt:面向下一代多智能体联合轨迹预测新框架(CVPRW2023)
自动驾驶如何学好C++?
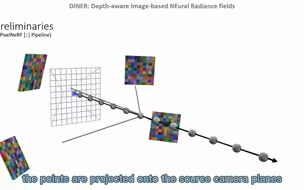
CVPR 2023 | DINER: 基于深度感知图像的神经辐射场
BEV-SAN:通过切片注意力网络实现精确的BEV 3D检测
【CVPR2023】 自动驾驶场景下理解BEV目标检测的鲁棒性
CVPR2023 | 利用神经辐射场提升全景三维场景理解的能力
逆天了!NeLF-Pro | 一个方法解决多种规模场景的快速渲染重建(CVPR'24)
多传感器融合!BEV感知融合算法介绍
CVPR2023最新!TBP Former:BEV下以视觉为中心的自动驾驶中的联合感知和预测网络
终生SLAM框架!BioSLAM:用于一般地点识别的仿生终身记忆系统
毫米波雷达-视觉融合感知方法(前融合/特征级融合/数据级融合)
LeTS-Drive:自动驾驶中不确定场景下的实时路径规划算法
常考题!目标跟踪中如何定义最优关联匹配?
决策规划都有哪些框架?PNC今年的香饽饽!近10种规控算法与代码实现你都知道吗?