V
主页
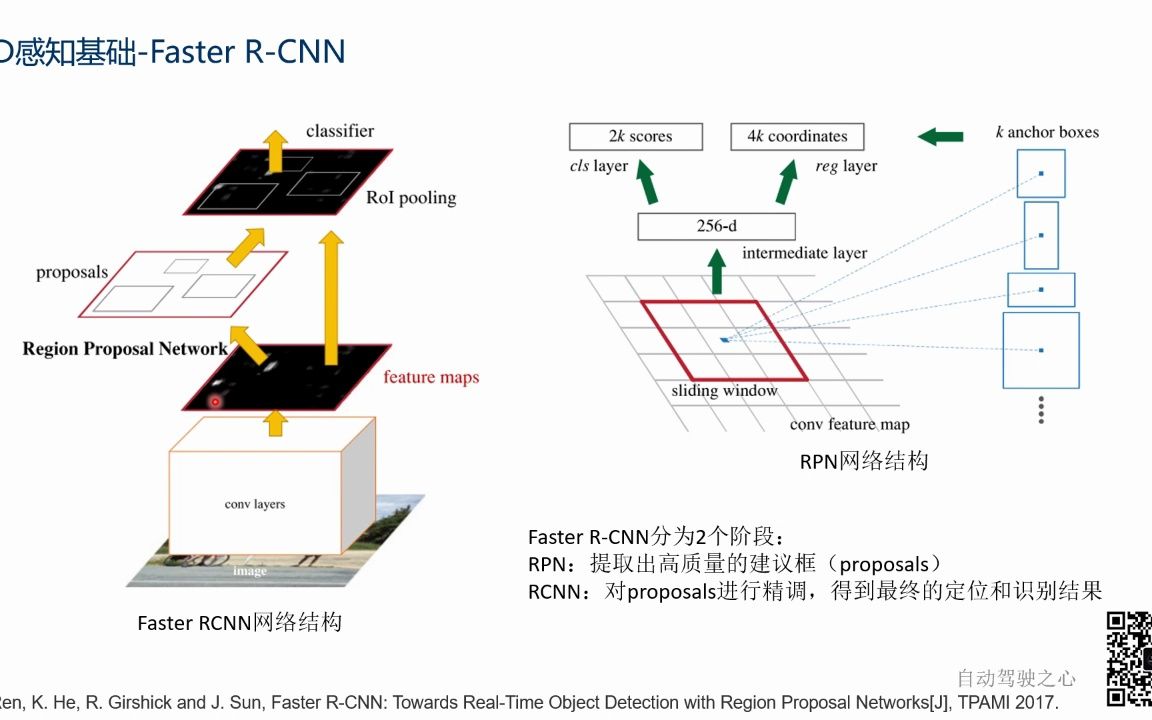
多模态3D检测相关2D和3D感知基础知识
发布人
多模态3D融合入门非常困难,在数据和算法层面的理解上难倒了一大帮人!许多同学在刚学习多模态感知算法的时候往往不知道如何下手,大多数人不清楚如何建立不同模态之间的关系,如何选择合适的融合方法以及如何实现高效的融合?在深入调研大家的需求后,我们选择了行业几乎所有主流多模态三维目标检测算法,其主要包括基于深度学习的前融合,深度特征融合以及后期结果融合三个层面。从0到1为大家详细展开网络结构设计、算法优化、实战等方方面面,内容非常详细,这是国内首门完整的多模态融合3D检测教程,一骑绝尘!最适合刚入门的小白以及需要在业务上从事多模态感知算法的同学,学习链接如下: https://wrzpl.xet.tech/s/1VWrEp
打开封面
下载高清视频
观看高清视频
视频下载器
大火的BEVFusion算法详解
直播分享!最新SOTA,多模态3D目标检测新方案(CVPR2023)
没有BEV特征如何做BEV感知?(旷视团队分享PETRv2/StreamPETR/CMT等SOTA方案)
跟知乎大V一起来学BEV!视觉BEV感知和跟踪算法详解
端到端算法有哪些优势?完爆传统感知规控?
太详细了!多传感器融合的策略和方法
看完缓解了我的技术焦虑!自动驾驶的产线标定以及标定间标定方法
面试必备!自动驾驶中BEV常考知识点大串讲
MetaBEV:解决BEV检测和地图分割的传感器故障新方案
在线高精地图与城市NOA是什么关系?为什么如此重要?
自动驾驶如何学好C++?
地平线最新SOTA!Sparse4D:迈向长时序稀疏化3D目标检测的新实践
上交&诺亚最新 | 大幅提升!OccGen:面向自动驾驶的生成式多模态3D占用预测
实战超详细!Radar、Lidar和前置Camera的标定
自动驾驶多传感器数据融合(2):IMU和GPS的融合定位
TensorRT部署车道线检测最强算法!Ultra-Fast-Lane-Detection-V2
【NeurIPS 2023】自动驾驶多模态感知蒸馏新方案来了!
牛津大学IROS2023最新!激光雷达相机外参标定新算法(大幅降低误差)
3D目标检测的数据标注/算法讲解/训练调优全系列闭环
使用YOLOv4完成激光雷达点云下的3D目标检测!
最新!DiscoNet:稀疏遮挡Lidar点云下的鲁棒3D感知方法!
2022最新 | HybridNets:端到端感知网络(检测+可行使区域分割+车道线三大任务)
基于交互感知的自动驾驶车辆轨迹规划——神经网络与模型预估计控制的集成
以特斯拉为案例:自动驾驶仿真框架分析(下,仿真应用/2D检测/3D检测/车道线)
毫米波雷达视觉算法CRAFT,这次彻底理解了!
自动驾驶多传感器数据融合(1):什么是多传感器融合?
Nuscenes、KITTI等多个BEV开源数据集介绍!
Nerf+SLAM会擦出什么样的火花?
一文尽览:自动驾驶大语言模型应用综述分享
Waabi最新!UnO:用于感知和预测的SOTA模型(超越监督方式)
TPVFormer:特斯拉occupany network的学术替代方案!清华大学工作
端到端算法是什么?自动驾驶领域是怎么做的?
视觉3D检测如何做自动标注?
特斯拉的4D自动标注详解!为什么无标注数据work?
CVPR2023最新!TBP Former:BEV下以视觉为中心的自动驾驶中的联合感知和预测网络
CVPR 2023:VoxelNeXt:用于3D目标检测和跟踪的全稀疏新框架!
面向下一代自动驾驶:全栈里程碑综述汇总
搞懂了!原来激光雷达和相机的内外参是这样标定的
CVPR2024最新BEV-Planner:Ego Status对于开环端到端自动驾驶的影响有哪些?
比赛冠军方案!英伟达最新 | Hydra MDP:端到端多模态规划