V
主页
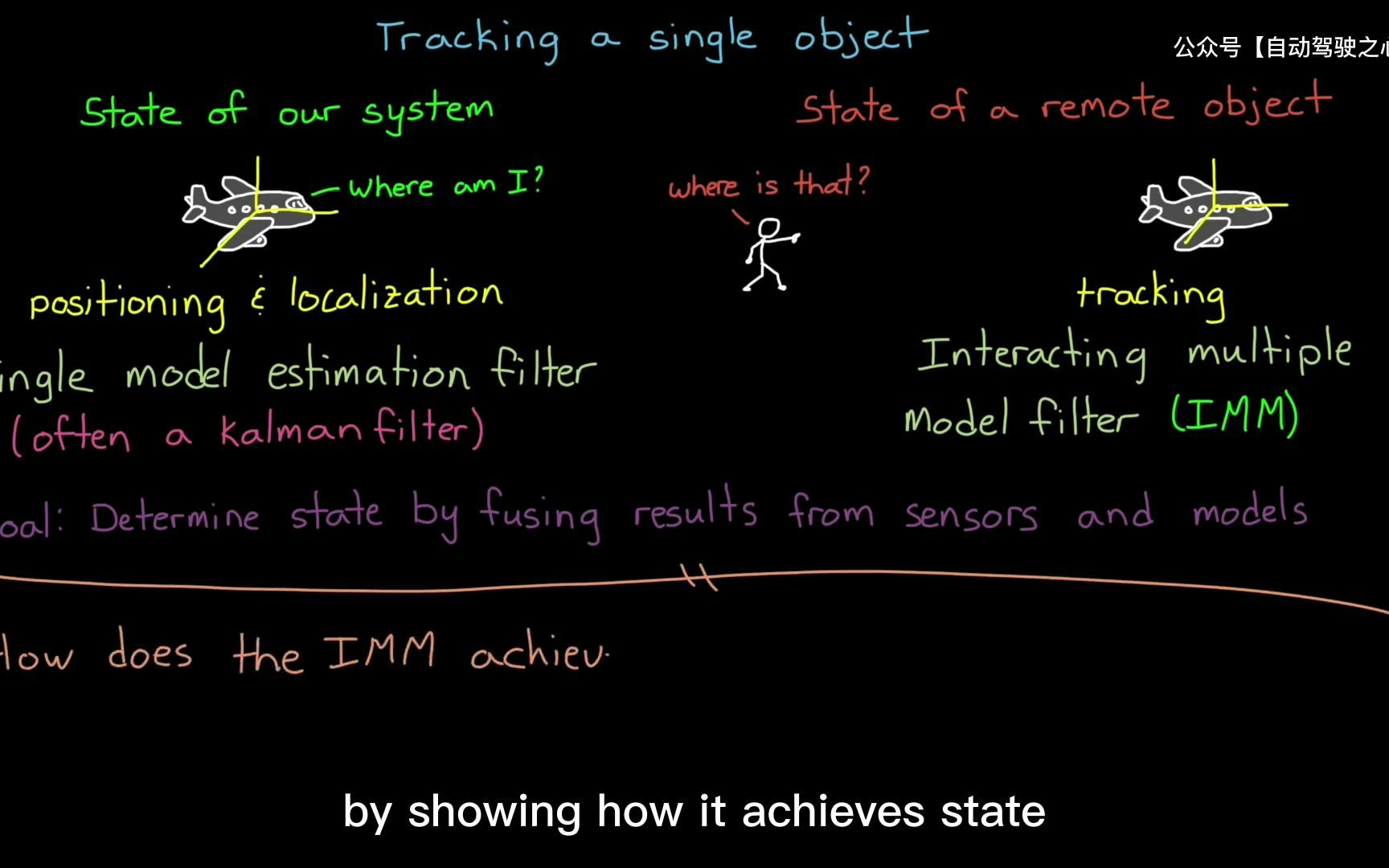
自动驾驶多传感器数据融合(3):单目标跟踪算法
发布人
自动驾驶多传感器数据融合(3):单目标跟踪算法
打开封面
下载高清视频
观看高清视频
视频下载器
自动驾驶多传感器数据融合(4):多目标跟踪算法
2022最新!基于激光雷达的3D目标检测综述(超全数据集和SOTA方法汇总)
ICRA2022 | 基于图的多传感器融合在自动施工机器人一致定位中的应用
自动驾驶中的多传感器融合有什么优势?如何快速入门到进阶?
常考题!目标跟踪中如何定义最优关联匹配?
Nerf+SLAM会擦出什么样的火花?
泰裤辣!谷歌最新,一次跟踪所有目标!Everything and everywhere
端到端算法是什么?自动驾驶领域是怎么做的?
讲明白了!端到端算法评估指标详解
NeurlPS'24 开源 | UAV3D 无人机大规模3D感知基准 数据集助力3D目标检测与跟踪
通过Intel Realsense 3D激光雷达完成SLAM任务!(性价比超高)
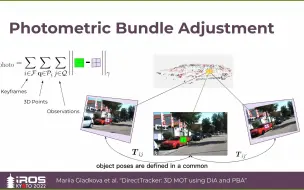
最新3D多目标跟踪方法DirectTracker:基于直接图像对齐和光度学束调整的3D多目标跟踪(IROS2022)
多传感器标定概述(Lidar/Radar/Camera/IMU/鱼眼相机)
ECCV2022最新 | 缺少点云数据?LiDARGen生成真实的激光雷达点云
高精地图制作关键技术及领域主流方案分享-part1
自动驾驶 3D LiDAR目标跟踪技术实现细节大揭秘!
实时3D激光SLAM | 基于广义ICP和位姿图优化的实时无里程计方案(超赞!)
自动驾驶中的多传感器融合状态估计如何建模?
【从放弃到精通】目标追踪—计算机博士精讲卡尔曼滤波算法教程 卡尔曼滤波从理论到实践(深度学习/计算机视觉/物体检测/目标跟踪/AI)
KTH最新SOTA!大规模回环闭合 | 基于NeRF的稠密SLAM
IROS2022 | MIMOSA:针对传感器退化的多模态SLAM框架
直播分享!最新SOTA,多模态3D目标检测新方案(CVPR2023)
【从放弃到精通】目标追踪—计算机博士精讲卡尔曼滤波算法教程 卡尔曼滤波从理论到实践(深度学习/计算机视觉/物体检测/目标跟踪/AI)
香港科技最新!Contour Context:3D激光雷达回环检测和度量姿态估计的抽象结构分布(ICLR2023)
使用YOLOv4完成激光雷达点云下的3D目标检测!
自动驾驶缺少数据怎么办?ChatSim助你生成高度真实的驾驶数据!
牛津大学 | IMU+Lidar+GNSS的多传感器融合用于机器人的精准定位!
IROS2022最新思路 | RCA:自监督学习实现视觉导航(具有驾驶舒适性)
还在为数据集发愁?!带你了解自动驾驶常见数据集哪里找!
CVPR2024 | 逆天了!一统所有目标感知任务,目标感知基础模型GLEE
CVPR2022 | SHIFT:当前自动驾驶最大的多任务合成数据集(雾天/雨天/雪天,检测、分割、深度图、实例分割、光流)
自动驾驶如何学好C++?
YOLO11目标检测教程 Label-studio制作数据集
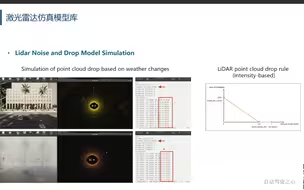
【ICRA 2023 | 首篇研究LiDAR基础设施部署的工作!作者亲自带你玩转传感器部署策略】第2节:高一致性传感器仿真模型库
最新!全路段体验特斯拉自动驾驶功能
第89集 | 使用 Ultralytics YOLO11 进行目标检测与跟踪 | 如何进行基准测试 | YOLO11 发布 🚀
自动驾驶仿真大观:聊聊仿真的研究背景
【CVPR2023】 自动驾驶场景下理解BEV目标检测的鲁棒性
太全了!从入门到精通YOLOv8、YOLOv7、YOLOv6、YOLOv5、YOLOv4、YOLOv3等YOLO目标检测算法!这不啃书爽十倍!
LiDAR-Camera多传感器融合!StradVision X VUERON Technology