V
主页
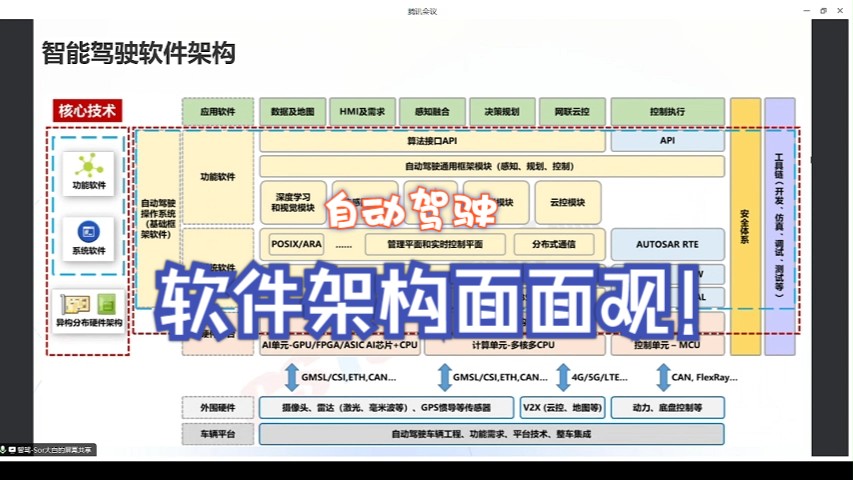
All in 算法并不是最佳职业发展道路?软件基础架构也是必须了解的!
发布人
自动驾驶之心X大白老师联合呈现!
打开封面
下载高清视频
观看高清视频
视频下载器
端到端自动驾驶:SparseDrive 算法详解
大模型时代下的端到端自动驾驶(上篇)
吹爆一个印度老哥的算法课程! 🎉你们可能还在怀疑他们的实力,但我要告诉你,一旦你真正了解过,就会知道他们在算法和IT界的地位,简直就是教科书般的存在!
【全网首讲】大佬开讲:我们是否走在开环端到端自动驾驶正确的道路上?
BEVPool是什么?实际工程应用中如何加速!!!深度解析
Tesla FSD V13前瞻!
自动驾驶的规划控制究竟在做什么?我们为什么需要规划控制
什么是端到端自动驾驶?什么是基础world model?
自动驾驶仿真大观:聊聊仿真的研究背景
看看顶级大佬如何梳理L2++决策算法的演进-下
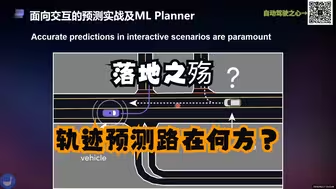
落地之殇 | 联合预测是端到端正确的道路么?
自动驾驶中的多传感器融合有什么优势?如何快速入门到进阶?
CUDA编程实战教程之:流和事件!彻底搞懂~
今年的智驾只有一个声音:端到端+大模型
专注于学习PnC的端到端方法详解
经验之谈,轨迹预测真正重要的是什么?
Day32打造自己的软件框架_美化上位机软件
史上最全!一次性梳理自动驾驶鲁棒性研究
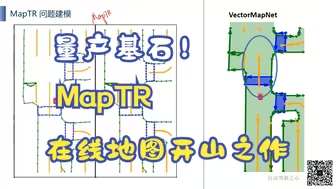
量产基石!MapTR:在线高精地图经典开山之作
多模态大模型综述: 数据、训练任务、架构分类、大模型实战训练
地平线VAD又又又上新了!VADv2比v1强在哪里?一起来听
【NeurIPS 2023】自动驾驶多模态感知蒸馏新方案来了!
自动驾驶主流的数据集有哪些?详解Argoverse数据集!
从零开始Mamba之路 | 如何从线性RNN的角度推导Mamba?
自动驾驶缺少数据怎么办?ChatSim助你生成高度真实的驾驶数据!
软件测试的尽头,就是框架的设计与研发!一个视频说明软件架构设计-核心关键点和底层逻辑
校招和社招转行人必看!2023年如何入局自动驾驶?
GPT-4V与自动驾驶更配?GPT-4V在自动驾驶中的早期探索!
Next.js 全栈开发实战课:每日一签网站——项目介绍+基础设施云平台
冠军分享!QCNeXt:面向下一代多智能体联合轨迹预测新框架(CVPRW2023)
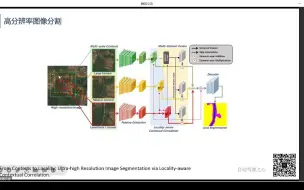
最新,语义分割三十年!基础与前沿进展!
打 倒 一 切 反 贼 ! 第一集
没有BEV特征如何做BEV感知?(旷视团队分享PETRv2/StreamPETR/CMT等SOTA方案)
决策规划都有哪些框架?PNC今年的香饽饽!近10种规控算法与代码实现你都知道吗?
Cursor / Windsurf + Android Studio 高效AI编程:零基础也能开发安卓应用
谷歌程序员能通过我的面试吗?
最近有哪些自动驾驶方向的github仓库值得star?
爆肝整理!CVPR2024可复现论文合集,原文/代码/演示全都有!(深度学习/计算机视觉)
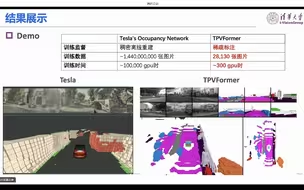
CVPR 2023 面向自动驾驶场景的纯视觉三维语义占有预测
地平线最新SOTA!Sparse4D:迈向长时序稀疏化3D目标检测的新实践