V
主页
从零开始Mamba之路 | 如何从线性RNN的角度推导Mamba?
发布人
Mamba是今年推出的一种新的神经网络架构,在语言建模方面比Transformer表现更好!这可能是自2017年以来人工智能领域最令人兴奋的发展。在本视频中,我将解释如何从线性RNN的角度推导Mamba。别担心,不需要状态空间模型理论!
打开封面
下载高清视频
观看高清视频
视频下载器
端到端基础!绕不开的感知模块
【CVPR 2024】刷爆榜单!SAFDNet:纯稀疏点云检测问鼎Waymo
自动驾驶中的多传感器融合都有哪些方法?基本流程都是什么?
数据为王!自动驾驶开源数据体系现状与未来
自动驾驶汽车是如何在高精地图中建立精确位置的?
端到端自动驾驶:SparseDrive 算法详解
自动驾驶的规划控制究竟在做什么?我们为什么需要规划控制
史上最全!一次性梳理自动驾驶鲁棒性研究
CUDA编程实战教程之:流和事件!彻底搞懂~
看看顶级大佬如何梳理L2++决策算法的演进-上
量产基石!MapTR:在线高精地图经典开山之作
All in 算法并不是最佳职业发展道路?软件基础架构也是必须了解的!
什么是端到端自动驾驶?什么是基础world model?
今年的智驾只有一个声音:端到端+大模型
一文尽览:自动驾驶大语言模型应用综述分享
Nerf+SLAM会擦出什么样的火花?
特斯拉的World Model是什么?怎么做端到端训练?
自动驾驶仿真利器!Street Gaussian:基于3D Gaussian Splatting的动态三维街景建模
端到端数据格式是什么样的?快来看看吧
B站强推!讲解最通俗易懂的【深度学习神经网络】,同济大佬保姆式讲解CNN、RNN、GAN原理及实战,比刷剧还爽!
端到端算法是什么?自动驾驶领域是怎么做的?
从0到1!彻底搞懂BEVFormer算法原理
【NeurIPS 2023】自动驾驶多模态感知蒸馏新方案来了!
地平线VAD又又又上新了!VADv2比v1强在哪里?一起来听
【CVPR2023】 自动驾驶场景下理解BEV目标检测的鲁棒性
几可乱真!面向真实场景的世界模型居然被用得这么六!
高精地图制作关键技术及领域主流方案分享-part1
CVPR2023 Highlight | Unisim:Nerf+自动驾驶,这不会是魔法吧?
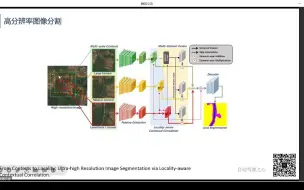
最新,语义分割三十年!基础与前沿进展!
【地平线×自动驾驶之心】ICCV 2023最新中稿的端到端自动驾驶框架—VAD!
自动驾驶如何学好C++?
搞懂了!原来激光雷达和相机的内外参是这样标定的
南洋理工大学博士分享!规模化可学习与交互式的自动驾驶决策系统如何构建?
CARLA实操,带你玩转常用地图格式转换及可视化
彻底搞懂!CUDA编程之:如何安装Nsight system及compute
自动驾驶仿真大观:聊聊仿真的研究背景
VastGaussian:首个基于3D Gaussian Splatting的大场景高质量重建和实时渲染方法
都在聊大模型,那怎么评价多模态大模型的好坏呢?
【200合集】一口气刷完CNN、RNN、GAN、GNN、DQN、Transformer、LSTM、DBN等八大深度学习神经网络算法!比刷剧还爽!-深度学习
看完缓解了我的技术焦虑!自动驾驶的产线标定以及标定间标定方法