V
主页
看看顶级大佬如何梳理L2++决策算法的演进-下
发布人
公众号【自动驾驶之心】后台回复 “决策算法” 获取视频完整课件!
打开封面
下载高清视频
观看高清视频
视频下载器
端到端算法是什么?自动驾驶领域是怎么做的?
端到端自动驾驶:SparseDrive 算法详解
自动驾驶中的多传感器融合有什么优势?如何快速入门到进阶?
多模态3D检测相关2D和3D感知基础知识
端到端基础!绕不开的感知模块
CVPR 2023 面向自动驾驶场景的纯视觉三维语义占有预测
【CVPR 2024 】ViDAR视觉点云预测赋能大规模端到端自动驾驶
自动驾驶面试一百问!秋招社招全搞定
SLAMesh: 基于Mesh地图的实时LiDAR定位与Mesh建图方法分享
多传感器标定的工具箱有哪些?
为什么说规划控制仍然是端到端自动驾驶的核心?全面复盘规划控制基础及决策规划框架
史上最全!一次性梳理自动驾驶鲁棒性研究
车辆轨迹有多少种玩儿法?CitySim数据集:轨迹预测、仿真、数字孪生应有尽有!
端到端数据格式是什么样的?快来看看吧
【CVPR 2024】刷爆榜单!SAFDNet:纯稀疏点云检测问鼎Waymo
经验之谈,轨迹预测真正重要的是什么?
讲明白了!端到端算法评估指标详解
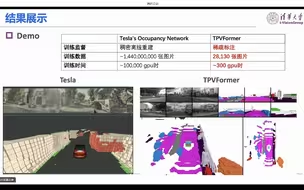
特斯拉的World Model是什么?怎么做端到端训练?
自动驾驶安全的关键!| 轨迹预测中的经典模型大盘点
CVPR2023 Highlight | Unisim:Nerf+自动驾驶,这不会是魔法吧?
从0到1!彻底搞懂BEVFormer算法原理
几可乱真!面向真实场景的世界模型居然被用得这么六!
【CVPR 2024】SIN-SLAM:基于神经隐式表征的稠密语义SLAM
视觉3D检测如何做自动标注?
【深信科创联合制作】仿真数据的一百种玩法 | 基于Carla传感器的仿真数据增强实战来了!
高精地图制作关键技术及领域主流方案分享-part1
IROS 2024 | NAVINACT:结合导航和模仿学习进行增强强化学习
R3LIVE++:一个实时鲁棒的紧耦合激光雷达-惯性-视觉融合框架
牛的!大佬是如何几分钟聊透时空联合规划框架的?
CVPR 2023 | BEVHeight:基于视觉的道路3D目标检测的鲁棒框架
专注于学习PnC的端到端方法详解
没有BEV特征如何做BEV感知?(旷视团队分享PETRv2/StreamPETR/CMT等SOTA方案)
拯救你的CUDA!什么是bank,为什么会发生bank conflict???
EM Planner is all u need?
内卷时代如何降低自动驾驶数据的标注成本?双域主动学习可能是答案!
来听大牛说!赵行老师在CVPR 2023年自动驾驶研讨会上发表的演讲
如何从零搭建自己的自动驾驶C++功能模块?
速度快!MobileNeRF:移动端实时渲染方案,Nerf导出Mesh
自动驾驶主流的数据集有哪些?详解Argoverse数据集!
面试必备!自动驾驶中BEV常考知识点大串讲