V
主页
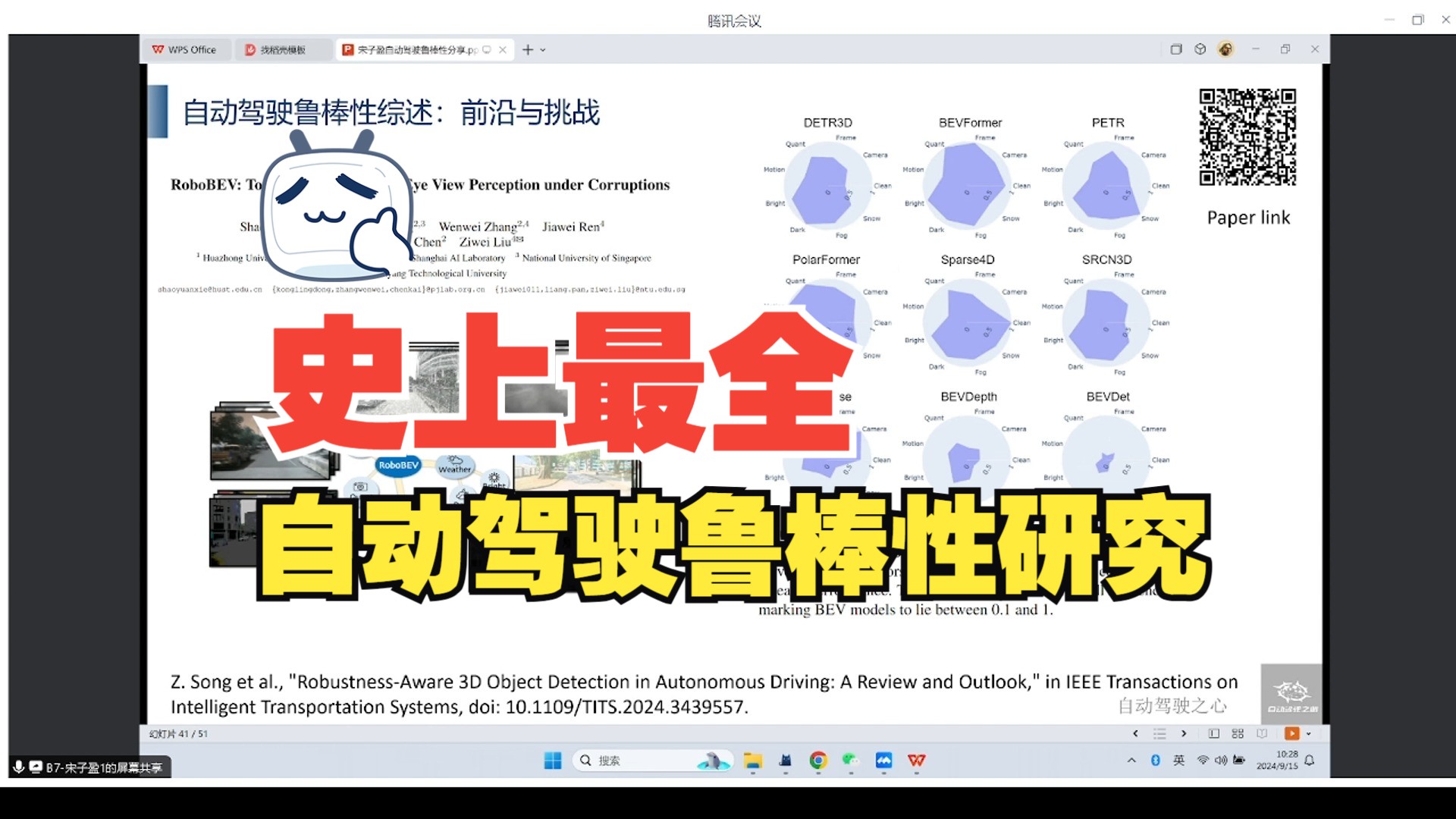
史上最全!一次性梳理自动驾驶鲁棒性研究
发布人
分享人简介: 宋子盈 北京交通大学计算机博士生、昆士兰大学联合培养、清华大学车辆学院联合培养、地平线感知组实习生 成果直通:[2401.06542] Robustness-Aware 3D Object Detection in Autonomous Driving: A Review and Outlook (arxiv.org)
打开封面
下载高清视频
观看高清视频
视频下载器
一文尽览:自动驾驶大语言模型应用综述分享
地平线VAD又又又上新了!VADv2比v1强在哪里?一起来听
端到端趋势下,传统规控还有未来么?
端到端算法是什么?自动驾驶领域是怎么做的?
LeTS-Drive:自动驾驶中不确定场景下的实时路径规划算法
20241114基于前瞻性推测的自动驾驶决策规划算法-重庆SAECCE
为什么说规划控制仍然是端到端自动驾驶的核心?全面复盘规划控制基础及决策规划框架
轨迹预测到底预测个啥???轨迹预测入门必备!
浙江大学最新 | BEVPlace++:激光雷达全局定位方法,超越当前SOTA!泛化性能极佳
自动驾驶规控工程师必备技能点!Coupling Trajectory Planning是个啥?
面试必备!自动驾驶中BEV常考知识点大串讲
端到端自动驾驶离我们还有多远?Think Twice:CVPR 2023闭环新SOTA!
自动驾驶主流的数据集有哪些?详解Argoverse数据集!
南洋理工大学博士分享!规模化可学习与交互式的自动驾驶决策系统如何构建?
校招和社招转行人必看!2023年如何入局自动驾驶?
ITSC2023 | LimSim:长期可交互多场景交通仿真器
英伟达冠军方案!Hydra-MDP:多模态端到端自动驾驶详解
太详细了!多传感器融合的策略和方法
自动驾驶中的多传感器融合都有哪些方法?基本流程都是什么?
端到端基础!绕不开的感知模块
恶劣天气可拿捏不了我的鲁棒性!AAAI大佬来助攻
自动驾驶规划控制的未来是什么?
自动驾驶安全的关键!| 轨迹预测中的经典模型大盘点
自动驾驶的规划控制究竟在做什么?我们为什么需要规划控制
自动驾驶面试一百问!秋招社招全搞定
CVPR2023 Nuplan自动驾驶轨迹规划比赛第二名方案详解
【IROS 2022】旅行时间减少47%!FAR Planner:使用动态可见性更新的快速、可尝试的路径规划
毫米波雷达视觉到底是怎么融合的?CenterFusion你搞懂了吗?
【地平线×自动驾驶之心】ICCV 2023最新中稿的端到端自动驾驶框架—VAD!
多传感器标定概述(Lidar/Radar/Camera/IMU/鱼眼相机)
看到了这个视频,彻底搞懂了PETR算法!
看看顶级大佬如何梳理L2++决策算法的演进-下
爆肝整理!CVPR2024可复现论文合集,原文/代码/演示全都有!(深度学习/计算机视觉)
计算效率提升20% | 直接LiDAR-惯性里程计:具有连续时间运动校正的轻量级LiDAR-惯性里程计
最新,语义分割三十年!基础与前沿进展!
牛的!大佬是如何几分钟聊透时空联合规划框架的?
规划控制都有哪些模块?PNC今年的香饽饽!近10种规控算法与代码实现你都知道吗?
讲明白了!端到端算法评估指标详解
系统回顾!基于Visual Transformer的分割模型综述
强推! 导师散养不管不问,中山大学最新最全的【SCI论文写作】从研究性以及综述论文角度出发全套流程-SCI论文_SCI论文写作