V
主页
CVPR 2024 | NVIDIA Research 获 CVPR 自动驾驶国际挑战赛“端到端自动驾驶”赛道冠军
发布人
#。。。加“SLYYDS24”,领24年【100篇】最新智驾论文➕多领域【面试真题】。备注『100』优先通过。。。# 英伟达Research继去年获得3D Occupancy预测冠军后,最近,又凭借Hydra MDP模型,在大规模端到端驾驶类别中击败了全球400多个参赛者,荣登榜首。Hydra MDP能够以端到端的方式学习环境如何影响规划,而无需借助不可微分的后处理方法。。。。。。 标题:Hydra-MDP: End-to-end Multimodal Planning with Multi-target Hydra-Distillation 链接:https://arxiv.org/html/2406.06978v3
打开封面
下载高清视频
观看高清视频
视频下载器
CVPR'24 Highlight 北大 | 扩展动态人景交互建模新突破, 生成的动作质量均优于现有技术
CVPR24 最佳学生论文:实现3DGS新突破,任意尺度无锯齿渲染!三名华人学者参与!
大疆 CVPR 2024 | AFNet自动驾驶中单视图和多视图深度的自适应融合
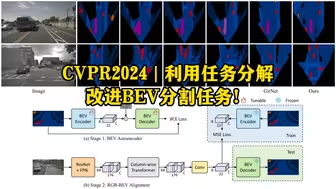
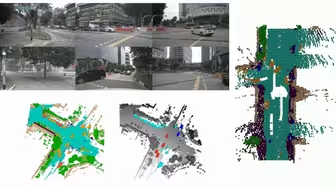
CVPR2024 | 利用任务分解改进BEV分割任务!
ECCV'24 | 从BEV到OSP:自动驾驶场景建模新趋势,提供更灵活精确的空间预测
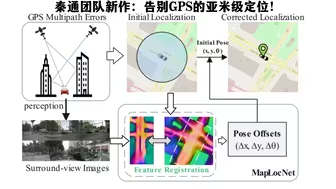
IROS24新作 | 上交大秦通团队,MapLocNet:实现自动驾驶新突破 告别GPS的亚米级定位!
【Python】柔顺控制——导纳控制
nuPlan:世界上首个现实世界自动驾驶数据集和基准,旨在测试基于机器学习的规划器处理各种驾驶场景以及做出安全且高效决策的能力
【理想城市NOA V6.3.0 (E2E-VLM Beta 4)】窄路人车混行,环岛通行,严重拥堵路口左转
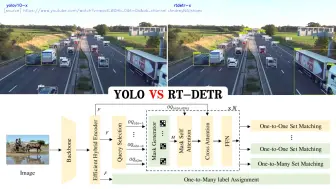
百度重磅推出RT-DETRv3,挑战所有RT-DERT与YOLO系列,实现目标检测的极速与精准
来自民间的30项关于特斯拉FSD v12版本 以上的实测,带你深度感受端到端 自动驾驶技术线路的优缺点
2024年最新手机CPU排行
移动机器人运动规划方法分类
移动机器人运动规划
ECCV'24 Oral | MVSplat:从稀疏多视图图像中实现高效的3DGS,用更少的参数,速度快2倍,还能跨数据集泛化
端到端智能驾驶系统的优势与实现方式,以及端到端智能驾驶系统是自动驾驶的未来吗?
ECCV'2024 北航、极氪领衔 | FSD-BEV:大幅度提升基于视觉的3D目标检测算法性能,实现感知新SOTA!
宇树G1机器人VS波士顿Atlas机器人,你觉得哪一个设计的相对更完美呢?
第二届自主机器人技术研讨会开始了!聆听一线的青年学者,纯粹的技术交流;学术界与企业界的思想碰撞,推动产学研深度合作
自动驾驶规划控制概况
AR与计算机视觉技术 | 吴克艰
ICRA'24 | RGBManip:仅基于单目RGB相机的机器人自主环境感知和操纵,实现精准环境感知
我从来不用自己剪视频,因为我会用AI
【附代码】2024全网公认最通俗易懂的(吴恩达机器学习)教程,超爽中英教学!!
ECCV'24 NVIDIA | DiPIR:堪称"变色龙",可将3D物体无缝融合进各种场景,提升视觉真实感
李飞飞团队提出ReKep,让机器人具备空间智能,还能整合GPT-4o!视觉与机器人学习的深度融合
为应对不确定性问题,提出的框架VADv2:通过概率规划实现端到端矢量化自动驾驶
多传感器融合感知
CVPR2024 | RegionPLC区域点云-语言对比学习,塑造3D开放世界场景理解新标准
运动规划中的Trajectory basis changing
首篇统一户外+室内3D检测框架推出,CVPR2024 | UniMODE:统一单目3D物体检测
PETR—作分享:基于位置编码的BEV感知范式
ECCV'24 最新Oral已开源 ! | 用于 3D大场景生成的金字塔扩散模型,实现无限场景生成与高效数据迁移
【2024全宇宙最简单AI大模型项目实战-3】LangChain+RAG+LlamaIndex+Agent
不开玩笑,小鹏的端到端后台其实是有人在操控
Cam4DOcc: 面向自动驾驶的视觉4D占用预测新基准,代码已开源,欢迎来拍砖
11万如何拥有端到端高阶智驾?详解宝骏云海灵眸智驾2.0 Max
【Python】冗余机械臂——逆运动学
ECCV 2024 代码开源 | HTCL:分层时间上下文,超过LiDAR,问鼎OCC,霸榜所有视觉方案
FPS暴增!NVIDIA控制面板最佳设置+堡垒之夜画面设置!