V
主页
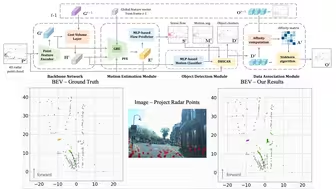
Cam4DOcc: 面向自动驾驶的视觉4D占用预测新基准,代码已开源,欢迎来拍砖
发布人
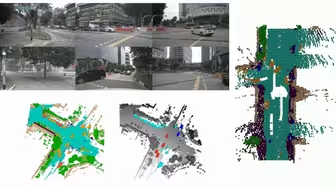
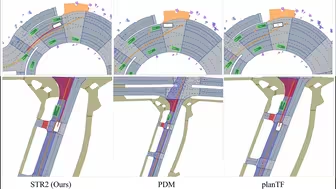
仅使用摄像机图像作为输入的占用估计技术,可以基于当前视觉观测提供大规模场景的密集占用表示。然而,它们大多局限于表示当前的3D空间,并没有考虑周围物体沿时间维度的未来状态变化。对此,为了将仅利用相机的占用估计扩展到时空预测,来自毫末智行、上海交通大学、国防科技大学、北京理工大学的研究员们联合提出了cam 4D oac,这是仅基于相机的4D占用预测的新基准,可评估未来周围场景的变化。目前该项目的代码已开源,可从此链接获取:https://github.com/haomo-ai/Cam4DOcc
打开封面
下载高清视频
观看高清视频
视频下载器
浙大最新开源!HVOFusion:使用混合体素八叉树进行增量网格重建
超越BEVFusion!DifFUSER:扩散模型杀入自动驾驶多任务(BEV分割+检测双SOTA)
清华&地平线最新开源!全任务SOTA!SparseDrive:端到端自动驾驶新范式!
NeurlPS'24 开源 | 使用VoxSplats 进行即时大规模场景重建,仅用3张 图像就可在20秒内重建百米大场景
ICRA'2024 | 最新开源!RaTrack4D:使用4D雷达点云进行移动物体检测和跟踪
nuPlan:世界上首个现实世界自动驾驶数据集和基准,旨在测试基于机器学习的规划器处理各种驾驶场景以及做出安全且高效决策的能力
一款面向无人机领域相关专业应用研究和二次开发的中小型自主智能无人机平台:问天L240自主智能无人机实验平台
【时空预测】DGCRN模型精讲,通俗易懂,一学就会
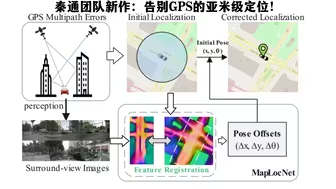
IROS24新作 | 上交大秦通团队,MapLocNet:实现自动驾驶新突破 告别GPS的亚米级定位!
中国科大新作 | 基于3D高斯的多模态融合在无界场景中的定位和重建
多伦多大学等发布!面向LiDAR点云的无监督目标检测
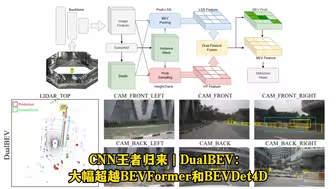
CNN王者归来,"DualBEV:在视图变换中,卷积神经网络是您所需的一切",大幅超越BEVFormer和BEVDet4D
3D Gaussian Splatting在自动驾驶中的应用——建模动态城市场景
MAVIS:使用基于SE2(3)的精确IMU预积分的多摄像头增强视觉惯性SLAM,该研究成果已被icra2024接受。
美团 | FocusBEV:自标定与时间融合策略提升单目BEV分割性能
SIGGRAPH'24 | 逆天!利用分层3D高斯表示,实时渲染超大规模场景!
自动驾驶主流感知范式:BEV
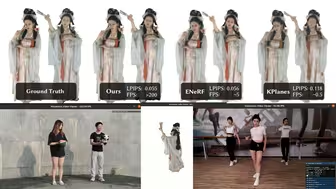
CVPR'24 | 4K分辨率实时4D 视图合成,好于eNeRF30倍并达到了最先进的渲染质量
激光雷达点云采集原理以及在自动驾驶中的应用(中文字幕)
研一在读,导师让学自动驾驶环境感知?有这45篇经典论文就够了!
关于3D Gaussian Splatting SLAM的又一最新开源力作推出,LIV GaussMap:用于实时3D辐射场地图渲染的激光雷达、惯性、视觉融
ECCV'24 | 从BEV到OSP:自动驾驶场景建模新趋势,提供更灵活精确的空间预测
视觉导航:从状态估计到运动规划
浙江大学,百度 | 显著提升BEV三维物体检测性能的体素池方法:BEVSpread
清华最新综述:第一个专门针对NeRF在自动驾驶领域应用的调查,旨在弥补当前文献中存在的明显空白
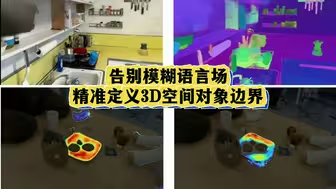
CVPR 2024 Highlight【清华、哈佛】|LangSplat:3D语言高斯溅射,告别模糊语言场,精准定义3D空间对象边界
ECCV'24 威斯康星大学麦迪逊分校 英伟达 | Dolphins:多模态学习提升自动驾驶像人类一样理解响应各种场景
CVPR2024 | SG-BEV:用于跨视图语义分割的卫星引导BEV融合,可实现精细的建筑属性分割
真的超容易“搞深度学习神经网络到底怎么改代码的啊?”复旦博士教我用一本书搞定!
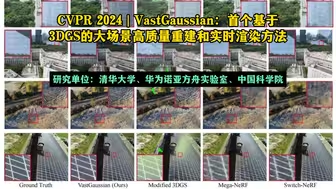
CVPR 2024 | VastGaussian:首个基于3D GS的大场景高质量重建和实时渲染方法,出自清华大学、华为诺亚方舟实验室、中国科学院
IROS'24 南开大学 | 通过动态拓扑图上的Voronoi划分实现快速且通信高效的多无人机探索
赵行团队新作 | 通过专家混合 模型提升自动驾驶运动规划器的 泛化能力,实现性能新SOTA
全球首个开源自动驾驶场景3DGS工作—S Gaussian:用于自动驾驶的自监督街道高斯,无需标注,就可实现逼真的街景重建
ECCV'24 NVIDIA | DiPIR:堪称"变色龙",可将3D物体无缝融合进各种场景,提升视觉真实感
爆肝整理!CVPR2024可复现论文合集,原文/代码/演示全都有!(深度学习/计算机视觉)
(清华&英伟达)高保真度!DriveEnv-NeRF:基于NeRF搭建真实自动驾驶环境
DiffTF:基于Transformer的大词汇量高质量 3D 物体生成框架,能够实现具有高度多样性、丰富语义和高质量的大词汇量3D物体生成。
UCSD、MIT华人团队开源Open-TeleVision:沉浸式体验跨越3000里的机器人远程操作。
ECCV'24 Oral 满分论文 | SpikeYOLO:脉冲神经网络新进展,引领高能低耗目标检测新纪元
ICRA2020 | 多传感器融合实现点云地图构建 R-LINS