V
主页
京东 11.11 红包
【保姆级】跟着代码学Apollo决策规划 Routing模块12:lane信息的填充
发布人
《跟着代码学Apollo决策规划》系列课程,保姆级,新手向。 //Apollo是完全免费、开源的平台,所以本课程也完全免费,主要目的是技术学习和交流。本课程只在这里发布,其他任何地方如有看到,无论是否收费,都是盗用,谨防被骗。 //我本人并不是Apollo的开发人员,课程中所有内容都是基于我对代码的阅读和过往工作经验所总结的,如果有错误或疏漏,欢迎指正,一起学习一起进步。
打开封面
下载高清视频
观看高清视频
视频下载器
【保姆级】跟着代码学Apollo决策规划 Routing模块9:智能指针简介
【保姆级】跟着代码学Apollo决策规划 Routing模块11:基于范围的for循环、直接初始化
【保姆级】跟着代码学Apollo决策规划 Routing模块3:接口的数据结构
【保姆级】跟着代码学Apollo决策规划 绪论3:决策规划模块概述
【保姆级】跟着代码学Apollo决策规划 绪论2:自动驾驶行业概述
【保姆级】跟着代码学Apollo决策规划 绪论1:课程概述
【保姆级】跟着代码学Apollo决策规划 Routing模块1:操作演示
【Apollo调试】绕障与跟车测试
自动驾驶算法的鄙视链
【保姆级】跟着代码学Apollo决策规划 Routing模块13:Navigator初始化、SearchRoute函数
《基于ROS2的决策规划算法工程开发》实机演示
《基于ROS2的决策规划算法工程》动态避障演示 无人小车的松弛感
【决策规划算法】自动泊车算法(C++)
【Apollo调试】Apollo规划算法静态障碍物绕行调试及代码解读
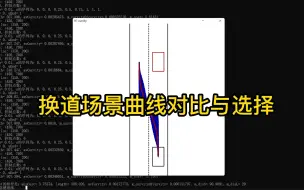
【决策规划算法】换道场景曲线对比与选择(C++)
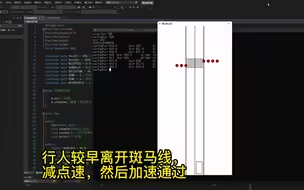
【决策规划算法】通过斑马线(C++)
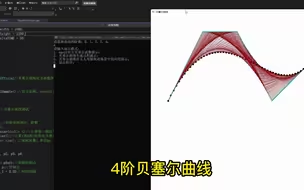
【决策规划算法】贝塞尔曲线(C++)
路径规划|基于维诺图的路径规划算法(ROS C++/Python/Matlab实现)
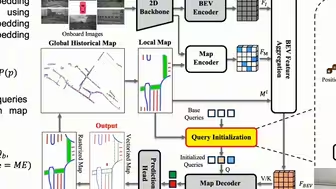
香港中文大学!ECCV '24开源 | HRMapNet:利用历史信息增强自动驾驶中的在线地图感知
A星算法很简单吗?
【决策规划算法】Astar、Dijkstra、BestFS算法对比演示(C++)
卧槽!这么好的【无人驾驶技术】全套教程不能只让我一个人学习,感知实战、视觉定位、路径规划、预测系统,翻遍全网找不到比这更详细的了!!!(自动驾驶/人工智能AI)
【决策规划算法】调头算法(C++)
如何快乐地单步调试Apollo9.0源代码?一次讲清楚
【vscode+cmake实战系列】构建、编译与调试
【决策规划算法】通过红绿灯(C++)
Apollo新版dreamview太好用了!
SLAM算法三小时即可入门!计算机大佬十节课精讲让你从零到一快速掌握SLAM理论及无人驾驶实战!
【保姆级攻略】如何正确打开现成的代码?
【决策规划算法】绕桩算法(C++)
【vscode+cmake实战系列】环境搭建与配置
【vscode+cmake+git实战系列】08 复杂项目-cmake嵌套构建
【决策规划算法】10天潜心设计,纯C++实现,分享一些小成绩
【Apollo调试】安装完成,开始调试(基于WSL2)
自动驾驶这么卷,普通人还有机会进吗?
【vscode+cmake+git实战系列】05 简单项目-构建方式1
【Apollo调试】自动泊车调试:有停车位、倒车入库
【Apollo调试】红绿灯场景调试(自动驾驶仿真)
【小白也能学会】VS代码调试保姆级攻略
到底是规划算法还是规控算法?生在这个时代 很多事情身不由己