V
主页
结构光的非线性问题与校正
发布人
结构光的非线性问题与校正 课程大纲: 1.结构光系统的非线性问题 2.避免非线性因素影响的方法 3.校正非线性因素影响的方法 4.总结 主讲介绍: 邓博 ,天津大学仪器科学与技术博士,主要研究投影结构光技术的传统与新兴应用,包括结构光三维测量、计算深度分割等。
打开封面
下载高清视频
观看高清视频
视频下载器
高速结构光三维面形测量方法
基于面结构光的高反射物体重建方法关键技术分享[相位偏折术]
公开课|结构光之相移法+格雷码技术详解
从零搭建一套结构光3D重建系统 [理论+源码+实践]
四旋翼模型与控制基础
Transformer模型结构
Occupancy Networks后处理
传感器与遥控器校准原理
PID控制器原理讲解
零基础入门四旋翼建模与控制无人机 | 数学模型
Occupancy占用网络的多维应用探究
上海 AI Lab&同济大学!基于八叉树结构的3D高斯体渲染方法,实现一致的实时渲染性能
Open3D与点云处理简介(公开课)
格雷码辅助实现的三维面形测量:从静态到动态
零基础入门四旋翼建模与控制无人机 | 基础知识
深度相机概述
[非完整版]基于结构光投影三维重建技术系列课程-绪论
四旋翼无人机-PX4控制算法代码
光学3D测量技术原理及应用
四旋翼无人机-TD跟踪微分器原理与仿真
如何轻松拿捏LIO-SAM-数学基础篇
CVPR23开源 超越LoFTR!大尺度变化下的特征匹配!
大作业|激光-视觉-IMU-GPS融合SLAM算法
当MVS遇上Gaussian MVSGaussian 快速、可泛化的高斯重建框架!-上篇
零基础入门四旋翼建模与控制无人机 | 位置PID控制实战
四旋翼无人机-实际飞行测试
LVI-SAM|视觉-惯性子系统(VIS)代码精读
点云3D深度学习模型与实践
单目深度估计|连续帧方法实战课
Python之函数的定义
四元数基础
零基础入门四旋翼建模与控制无人机 | 四旋翼PID控制
无需额外训练!SAMPro3D:零样本3D分割一切!
TRO 2023 适用于高分辨率雷达的非光线投射占用栅格建图
WACV2023:基于结构光的RGB事件相机(代码开源)
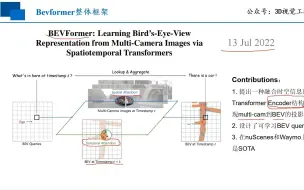
BEVFormer:时空transformer架构
零基础入门四旋翼建模与控制无人机 | 四元数基础
绪论(LOAM系列与LIO-SAM简介)
绪论|单目相机标定理论及张正友标定法(上篇)
四旋翼无人机-PX4控制算法原理