V
主页
京东 11.11 红包
四旋翼无人机-TD跟踪微分器原理与仿真
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
四旋翼无人机-PX4控制算法原理
极快跟踪一切!DOT:无惧遮挡!
香港大学发表超强无人机实时避障算法:以后无人机再也不怕撞了!
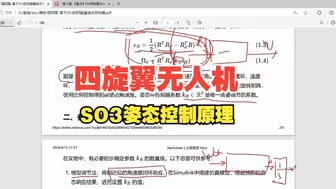
四旋翼无人机-SO3姿态控制原理
PID控制器原理讲解
四旋翼无人机-PX4控制算法代码
四元数基础
最新!无人机动态环境感知&规划新思路!
四旋翼模型与控制基础
CVPR2024开源NetTrack:跟踪高动态物体!
无人机|PID算法详解与实战(上)
【自制】F405飞控(开发记录)
四旋翼无人机-实际飞行测试
Sicence子刊,复杂环境下卷积网络实现端到端高速自主飞行!
网友设计的STM32无人机飞控板,一起来帮他看一下~
不炸就是胜利 100块组装五寸穿越机
CVPR'24开源 MASA万能匹配一切、跟踪一切!
无人机自主探洞!大规模三维环境中无人机基于图的拓扑探索规划(ICRA2021)
香港大学火星实验室:无人机利用机载电脑感知计算躲避动态障碍物
第一次觉得穿越机声音这么吓人…
从零开始制作四旋翼无人机 EP01 - 硬件原理图与PCB介绍
世界上第一个专为无人机集群设计的激光雷达惯性里程计框架
IROS2022:无人机自主规划最快线路,赛道时速60km!
CVPR'24最佳学生论文亚军!新赛道!SpiderMatch:3D形状匹配
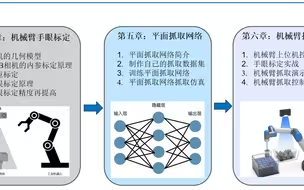
机械臂抓取-开发环境搭建
到底是不是在黑Air3S?来自一名大疆铁粉的真实体验
无人机—互补滤波姿态估计、卡尔曼滤波姿态、高度估计
无人机-PID算法详解与实战
无人机|几何约束下多旋翼无人机的全状态在线轨迹规划
Anduril发布Bolt-M便携式自杀无人机
中国科大 | 性能增强的四旋翼运动规划器用于复杂动态环境中的自主飞行
四旋翼模型简介-御风250模型
迷你发动机
假炸机,真刑!国内首起利用反制枪偷盗无人机案件
端到端!首个开源视觉Transformer四旋翼控制避障方案!
零基础入门四旋翼建模与控制无人机 | 姿态控制
无人机自动跟踪天线,相当于机载AAT,增强图传信号,扩展图传距离。
清华最新开源万能3D分割一切!
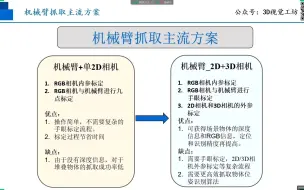
机械臂抓取简介
吊打ORB3!73Hz!南洋理工重磅开源AirSLAM:无惧复杂光照的超强点线视觉SLAM!