V
主页
京东 11.11 红包
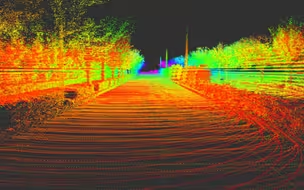
自动驾驶中的深度学习模型部署实战-数据预处理NPP库介绍及CUDA编程模型之线程操作
发布人
学习地址:https://app0S6nfQRG6303.h5.xiaoeknow.com 一个专注3D视觉领域课程分享的平台!依托公众号3D视觉工坊与计算机视觉工坊。 课程主要包括:自动驾驶、SLAM、三维点云、三维重建、机械臂抓取与位姿估计、结构光等。
打开封面
下载高清视频
观看高清视频
视频下载器
自动驾驶中的深度学习模型部署实战-CUDA编程优化、profile使用
自动驾驶实战课之多相机间的同步实战
自动驾驶中的深度学习模型部署实战-CUDA编程之内存访问、CUDA异步并行执行
自动驾驶中常用传感器硬件介绍
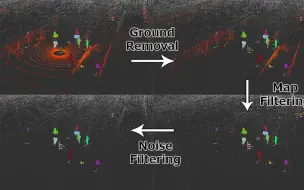
点云3D深度学习模型与实践
自动驾驶中实战课之Lidar与IMU的同步实战
极快跟踪一切!DOT:无惧遮挡!
上海 AI Lab开源力作!DriveArena: 首个基于生成模型的自动驾驶闭环仿真平台
自动驾驶中实战基础之3D-2D求解方法
单目深度估计|连续帧方法实战课
02 自动驾驶中常用传感器硬件介绍(Camera + LiDAR + Radar + IMU)(上篇)
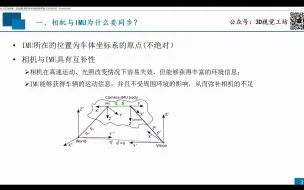
自动驾驶实战课之相机与IMU间的同步实战
光学3D测量技术原理及应用
自动驾驶中实战基础之点云去畸变与对齐
这绝对是质量最高的单目深度估计开源方案!
自动驾驶中的视觉感知技术
斯坦福团队EquiBot:仅用 5 分钟演示,机器人就能学会日常操作
四旋翼模型与控制基础
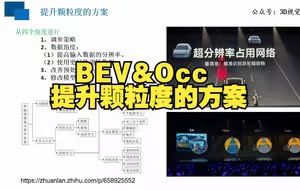
BEV&Occ提升颗粒度的方案
CVPR2023:不使用任何3D数据标签,零样本学习3D场景理解
清华最新开源MARS!第一个基于NeRF的自动驾驶开源模拟器!
五分钟开发一款自己的点云处理软件(python)
香港大学&南科大!通过基于模型的学习实现直接基于点的端到端机器人导航
深度相机概述
CVPR&NeurIPS2024开源 | 迈向通用可泛化的自动驾驶世界模型
CVPR 2024开源 VSRD:无需LiDAR和标注使用2D渲染解决3D检测的新范式!
无人机-PID算法详解与实战
传统深度估计方法实战
激光-视觉-IMU-GPS融合SLAM系列课程-传感器介绍与代表性SLAM解析
无需真实机械臂也可以训练具身大模型!通过Robostudio的R2S2R工具链来采集训练和部署机器人策略
03 自动驾驶中多传感器同步理论(Camera + LiDAR + Radar + IMU)(上篇)
Transformer模型结构
自驾场景 快速训练!CarDreamer:首个开源世界模型自动驾驶平台
[ICCV2021] DSEC:用于驾驶场景的双目事件相机数据集
Power:自动驾驶中鸟瞰视图下端到端实例预测
PID控制器原理讲解
ECCV'24开源 | DoubleTake深度估计& 三维重建最强解决方案!
四元数基础
NVIDIA再斩CVPR冠军方案!Hydra-MDP:突破端到端多模态自动驾驶!
LightGlue:最强轻量级特征匹配?