V
主页
自动驾驶中的深度学习模型部署实战-CUDA编程优化、profile使用
发布人
学习地址:https://app0S6nfQRG6303.h5.xiaoeknow.com 一个专注3D视觉领域课程分享的平台!依托公众号3D视觉工坊与计算机视觉工坊。 课程主要包括:自动驾驶、SLAM、三维点云、三维重建、机械臂抓取与位姿估计、结构光等。
打开封面
下载高清视频
观看高清视频
视频下载器
点云3D深度学习模型与实践
极快跟踪一切!DOT:无惧遮挡!
自动驾驶中的深度学习模型部署实战-CUDA编程之内存访问、CUDA异步并行执行
自动驾驶中的深度学习模型部署实战-数据预处理NPP库介绍及CUDA编程模型之线程操作
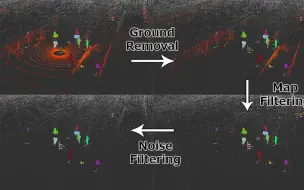
Occupancy的工程细节
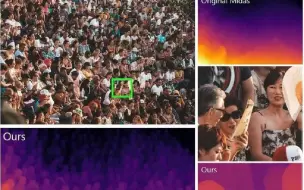
这绝对是质量最高的单目深度估计开源方案!
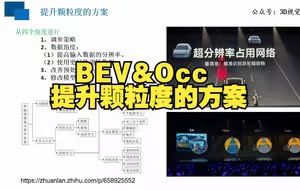
BEV&Occ提升颗粒度的方案
自动驾驶实战课之多相机间的同步实战
英伟达最新开源|EmerNeRF全面基于NeRF的自动驾驶仿真框架无需分割!
Transformer模型结构
自动驾驶中的视觉感知技术
自驾场景 快速训练!CarDreamer:首个开源世界模型自动驾驶平台
CVPR 2024开源 VSRD:无需LiDAR和标注使用2D渲染解决3D检测的新范式!
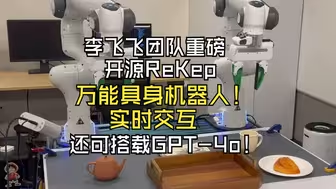
李飞飞团队重磅开源ReKep:万能具身机器人!实时交互,还可搭载GPT-4o!
单目深度估计|连续帧方法实战课
无需额外训练!SAMPro3D:零样本3D分割一切!
BEV与Occupancy入门参考资料必看
自动驾驶中实战课之Lidar与IMU的同步实战
双目相机标定基础及标定实战
传统深度估计方法实战
光学3D测量技术原理及应用
3DGS进化,高效高质量的GaussianPro来袭!
五分钟开发一款自己的点云处理软件(python)
如何进行三维重建?从单帧深度估计到完整模型重建
深度相机概述
MIT重磅开源!别再用COLMAP了!FlowMap给你最精确的SfM!
自动驾驶中常用传感器硬件介绍
清华最新开源万能3D分割一切!
无人机|PID算法详解与实战(上)
清华最新开源MARS!第一个基于NeRF的自动驾驶开源模拟器!
2.4倍加速!PRAM最新开源的视觉定位模型!解锁以地图为中心的学习!
北交博士主讲:深度学习驱动下的相机标定技术发展(上篇)
自动驾驶中实战课之Camera与IMU的融合实战
香港大学&南科大!通过基于模型的学习实现直接基于点的端到端机器人导航
ECCV'24开源 | DoubleTake深度估计& 三维重建最强解决方案!
CVPR2023|基于深度学习MVS的最新进展 GeoMVSNet
相机标定的基本原理与经验分享
CVPR2024开源NetTrack:跟踪高动态物体!
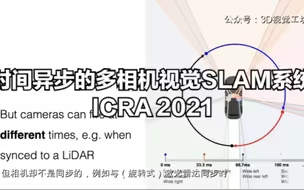
ICRA2021,时间异步的多相机视觉SLAM系统,效果大幅提升,更符合实际情况(代码即将开源)
如何高效学习单目深度估计?