V
主页
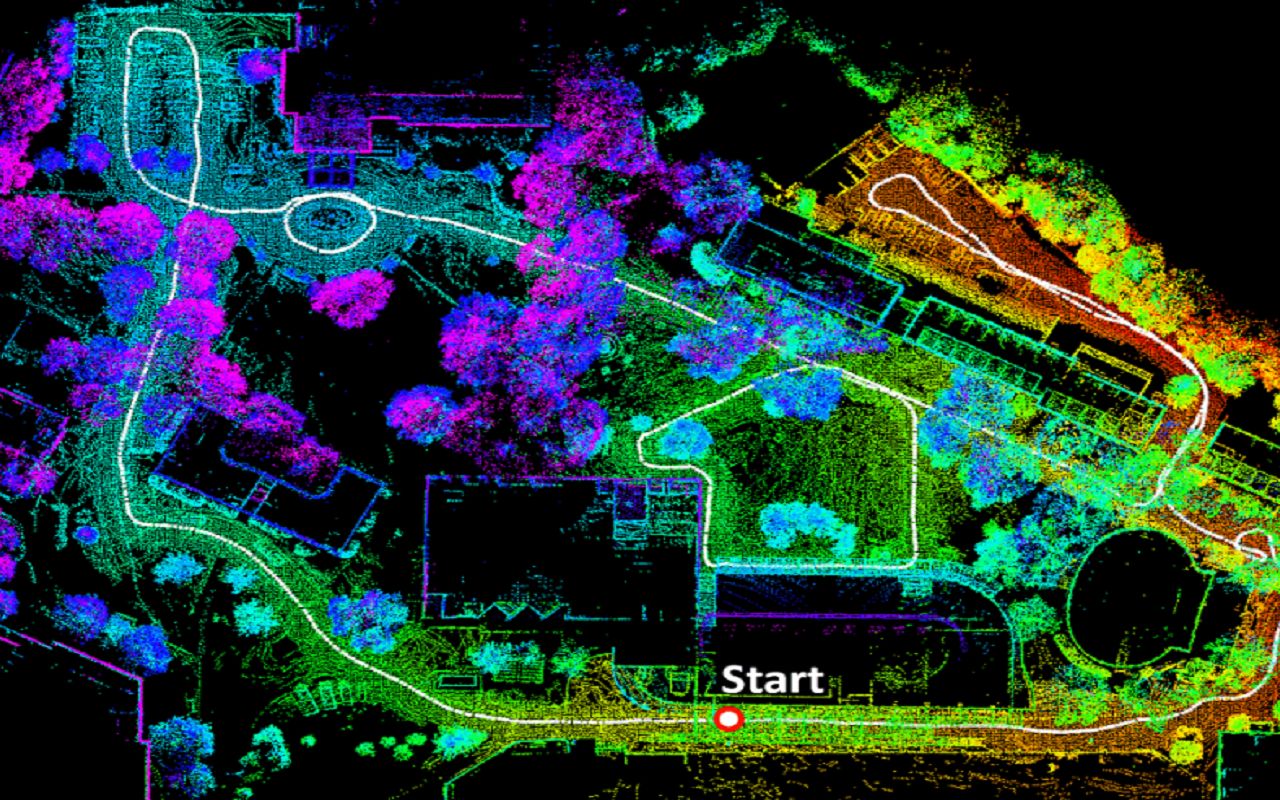
透彻剖析室内外激光SLAM算法与实战系列课程-激光SLAM传感器基本原理
发布人
如题。
打开封面
下载高清视频
观看高清视频
视频下载器
透彻剖析室内外激光SLAM算法与实战系列课程-激光SLAM精讲(下)
激光-视觉-IMU-GPS融合SLAM系列课程-传感器介绍与代表性SLAM解析
透彻剖析室内外激光SLAM算法与实战系列课程-室内激光SLAM建图定位实战
大作业|激光-视觉-IMU-GPS融合SLAM算法
ORB-SLAM3基本原理与系统架构
[非完整版]透彻剖析室内外激光SLAM算法与实战系列课程-激光SLAM后端优化方法
相机标定的基本原理与经验分享
无人机|PID算法详解与实战(上)
香港大学发表超强无人机实时避障算法:以后无人机再也不怕撞了!
(公开课)视觉SLAM原理与ORB-SLAM3系列算法
自动驾驶中常用传感器硬件介绍
光学3D测量技术原理及应用
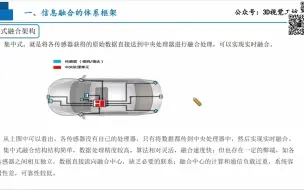
自动驾驶中多传感器信息融合理论(下)
传感器与遥控器校准原理
四旋翼飞行器:算法与实战
SLAM里程碑!戴森机器人实验室最新开源:3D GS杀入SLAM!
最新ICRA2021论文,基于成像激光雷达的稳健位置识别,代码开源!
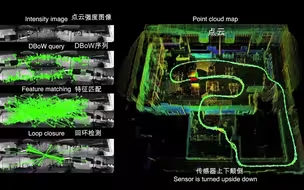
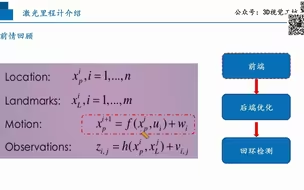
激光里程计精讲(上)
FUTR3D:统一的传感器融合框架
四旋翼无人机-PX4控制算法原理
【3D视觉工坊】第十四期直播 慕尼黑工业大学博士详解室内SLAM中的几何约束
华为最新工作:RoadMap:用于自动驾驶视觉定位的轻量化语义地图
SIGGRAPH'2024|RTG-SLAM:基于3DGS的大尺度场景实时三维重建-上篇
【3D视觉工坊】第七期公开课:图像对齐算法
20+FPS!最新开源!加上回环检测的NeRF SLAM竟是如此精确!
3D线激光相机检测技术解析与应用分享
南洋理工大学开源F-LOAM:最为精确和快速的开源激光SLAM方案之一
小白如何手写g2o优化? 残差构建、雅克比推导、优化函数
如何学习NeRF/3DGS-SLAM?(公开课直播回放)
三维点云系列视频——第一章绪论
香港大学工作,FAST-LIO:基于紧密耦合迭代卡尔曼滤波的快速、鲁棒的激光雷达里程计包,代码开源
【3D视觉工坊】第十六期 视觉惯性SLAM之多约束扩展卡尔曼滤波
107 FPS!开源!结合ICP和3D GS构建最快的稠密SLAM!
高速结构光三维面形测量方法
R2LIVE:稳健,实时,LiDar、惯性、相机的多传感器SLAM框架(代码开源)
如何轻松拿捏LIO-SAM-数学基础篇
自动驾驶中多个小视场固态激光雷达不依赖参照物的外参标定(代码即将开源)
高斯抛雪球SLAM
PID控制器原理讲解
经典3d视觉论文回顾,Facebook用『SLAM+实时光流』实现AR真实遮挡效果,发表在顶刊 ACM Transactions on Graphic 2018