V
主页
京东 11.11 红包
【ECCV2022】提速27倍!视频帧插值的实时中间流估计
发布人
代码链接:https://github.com/megvii-research/ECCV2022-RIFE 论文链接:https://arxiv.org/abs/2011.06294v12 实时视频帧插值(VFI)在视频处理、媒体播放器和显示设备中非常有用。我们提出了一种用于VFI的实时中间流估计算法RIFE。为了实现高质量的基于流的VFI方法,RIFE使用了名为IFNet的神经网络,该网络可以以更快的速度端到端地估计中间流。为稳定的IFNet训练和提高整体性能,设计了特权蒸馏方案。RIFE不依赖于预先训练的光流模型,并且可以支持具有时间编码输入的任意时间步长帧插值。实验表明,RIFE在多个公共基准上实现了最先进的性能。与流行的SuperSlomo和DAIN方法相比,RIFE的速度提高了4到27倍,并产生了更好的结果。此外,由于时间编码,RIFE可以扩展到更广泛的应用。
打开封面
下载高清视频
观看高清视频
视频下载器
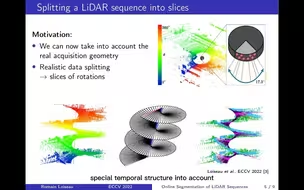
速度超快!激光雷达序列的在线分割:数据集和算法(ECCV2022)
【ECCV2022】SOTA!MeshLoc:基于网格的视觉定位
【ECCV 2022】清华大学&字节跳动提出 ParticleSfM:从单目视频中估计运动相机的位姿
ECCV2022 | ViT到底有多少种玩儿法?ViT-V2X:协同感知与ViT的首次碰撞会有怎样的火花?
SOTA!ECCV2022 | 实现精确的主动相机定位(Camera Localization)
RangeDet:基于Range-View的激光雷达3D目标检测网络(ICCV2021)
【ECCV 2022】显著减少自动驾驶碰撞率!可微分光线投射应用于自监督占位预测
自动驾驶最新仿真算法 | KING:通过运动学梯度生成安全关键驾驶场景以进行稳健模仿(ECCV 2022)
3D目标检测底层革新被ScartterFormer玩明白了!支持算子定制,实现灵活交互(ECCV2024 )
ECCV2022最新 | 缺少点云数据?LiDARGen生成真实的激光雷达点云
ECCV2022 workshop | 自动驾驶中的自监督学习part1(数据处理、深度估计、3D检测/跟踪、SLAM、定位等!)
【ECCV2022】自监督新SOTA!加速4倍!点云上自监督学习的Masked Discrimination
ECCV2022 | Box2Mask:强!mAP-50达到全监督97%!
ECCV2022 | 高效视觉transformer中的自适应token采样!
【WACV2023】即插即用!频率感知自监督深度估计SOTA!
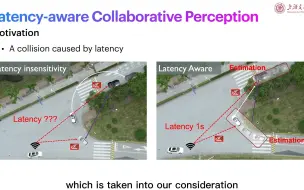
【ECCV 2022】SyncNet:Latency-Aware协作感知!(上交&上海AI Lab)
NVIDIA最新!NVIDIA RTX Extreme:实时车辆渲染
大火的BEVFusion算法详解
香港理工大学最新!Slamesh: 使用激光雷达传感器进行实时定位和网格划分
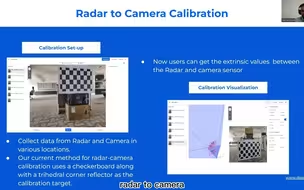
搞懂了!原来激光雷达和相机的内外参是这样标定的
【ICCV 2023】HAMLET:实时语义分割域自适应方法
如何理解开放世界3D场景?OpenIns3D给你新思路!
自动驾驶主流的数据集有哪些?详解Argoverse数据集!
特斯拉的自动标签系统如何改变大数据的本质!
看完缓解了我的技术焦虑!自动驾驶的产线标定以及标定间标定方法
毫米波雷达-视觉融合感知方法(前融合/特征级融合/数据级融合)
看到了这个视频,彻底搞懂了PETR算法!
【IROS2022】Voxfield:用于在线规划和三维重建的非投影符号距离场
Nvidia强大的神经重建引擎:场景重建和事件注入(Neural Reconstruction Engine,NRE)
最强AI换脸算法,无缝实时,超高精度
【全874集】目前B站最全最细的ChatGPT零基础全套教程,2024最新版,包含所有干货!一天就能从小白到大神!少走99%的弯路!存下吧!很难找全的!
ICCV 2023 | CLNeRF:持续学习遇到NeRF
WACV 2022 | SIDE:具有结构感知实例深度估计的基于中心的立体3D目标检测器
3D目标检测的数据标注/算法讲解/训练调优全系列闭环
【地平线×自动驾驶之心】ICCV 2023最新中稿的端到端自动驾驶框架—VAD!
ICCV 2023 | Make it 3D!扩散模型从单个图像生成高保真3D效果
史上最全 | 自动驾驶中的多传感器标定校准(Lidra/Radar/Camera/Stereo/IMU等)
Nuscenes、KITTI等多个BEV开源数据集介绍!
【IROS 2022】SOTA!基于粒子滤波的机器人定位和建图(浙大)
ICCV2023 | MPOT:多平面目标跟踪