V
主页
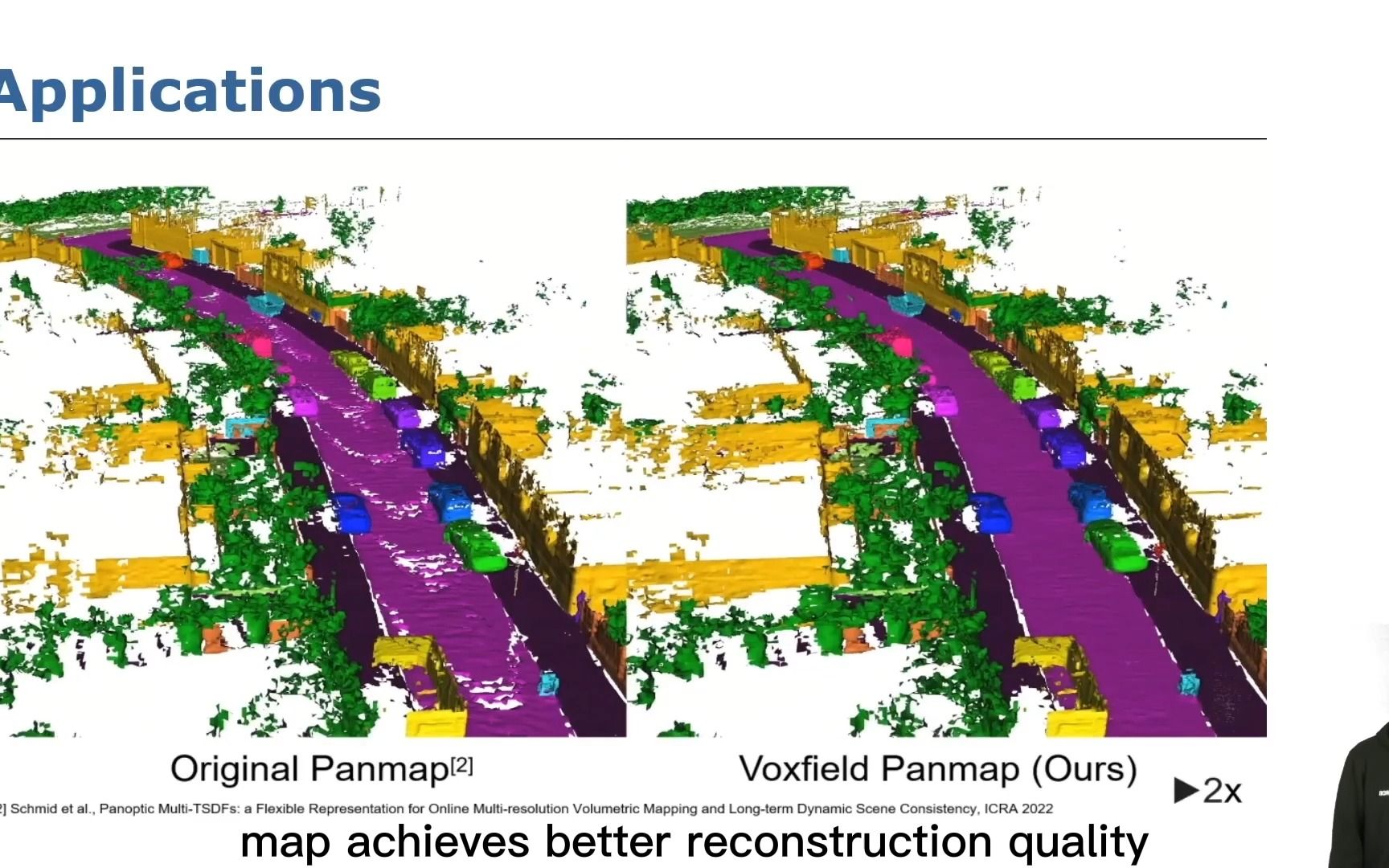
【IROS2022】Voxfield:用于在线规划和三维重建的非投影符号距离场
发布人
视频链接:https://www.youtube.com/watch?v=4HB4RXChrbg&ab_channel=V4RL-team 论文链接:https://www.research-collection.ethz.ch/handle/20.500.11850/560719 代码链接:https://github.com/VIS4ROB-lab/voxfield 创建复杂未知环境的精确地图对于真正的自主导航机器人至关重要。然而,在线构建这些地图绝非易事,尤其是在计算和能量受限的移动系统(如小型无人机)上处理大量原始传感器读数时。尽管近年来出现了许多解决此问题的方法,但为了效率的考虑,通常会牺牲映射精度,因为系统近似误差是可以容忍的。基于这些挑战,我们提出了Voxfield,这是一种映射框架,它可以在线生成地图,比现有技术具有更高的精度和更低的计算负担。基于非投影截断符号距离场(TSDFs)的新公式,我们的方法生成更精确和完整的地图,适合于曲面重建。此外,它可以高效生成欧氏带符号距离场(ESDF),例如,对于路径规划而言,ESDF非常有用,不会受到典型近似误差的影响。通过使用真实世界和合成的公共数据集进行的一系列实验,我们证明了我们的方法在地图覆盖率、准确性和计算时间方面优于最先进的水平。此外,我们还表明,Voxfield可以在最近的多分辨率映射框架中用作后端,即使在大规模实验中也可以生成高质量的地图。最后,我们通过在四驱车上运行该方法验证了我们的方法,表明它可以生成精确的ESDF地图,用于实时路径规划和避障。
打开封面
下载高清视频
观看高清视频
视频下载器
IROS2022 | 毫米波雷达和相机融合在高分辨率和远距离深度成像中的探索
用于激光雷达视图合成和三维重建的瞬态神经辐射场
VastGaussian:首个基于3D Gaussian Splatting的大场景高质量重建和实时渲染方法
【CoRL2022】路径规划新SOTA!PlanT:通过目标级表示的可解释的规划Transformers
别再用SuGaR了!重磅开源SA-GS:重新定位最新大场景3D重建SOTA(上篇)
毫米波雷达-视觉融合感知方法(前融合/特征级融合/数据级融合)
逆天了!NeRF-Casting:逼真重建和渲染高光泽目标
决策规划都有哪些框架?PNC今年的香饽饽!近10种规控算法与代码实现你都知道吗?
【IROS 2022】旅行时间减少47%!FAR Planner:使用动态可见性更新的快速、可尝试的路径规划
【IROS2022】加速24%!RobotCore:ROS 2中硬件加速的开放架构
IROS2022最新思路 | RCA:自监督学习实现视觉导航(具有驾驶舒适性)
三维重建大一统!LSM:无需先验位姿,首次实现实时语义3D重建!
【地平线×自动驾驶之心】在线高精矢量化地图构建SOTA方案MapTR v1/v2、LaneGAP
清华大学&英伟达 | DriveEnv-NeRF:基于NeRF实现高逼真自动驾驶场景,离线测试!
SemanticKITTI SOTA!激光雷达数据中的运动目标分割(IROS2022)
【IROS2022】4D车载雷达自监督场景流估计SOTA!
自动驾驶缺少数据怎么办?ChatSim助你生成高度真实的驾驶数据!
UC伯克利最新!S3Gaussian:全球首个开源的自动驾驶场景3D GS工作
ICRA2023 | 激光雷达相机内外参联合标定方案!
端到端趋势下,传统规控还有未来么?
牛津大学最新!室内室外SOTA | 用于视觉重定位的地图相对姿态回归(CVPR'24 HighLight)
太详细了!多传感器融合的策略和方法
IROS2022最新 | 基于激光雷达的三维运动目标分割的高效时空信息融合
ETH最新!CVPR2024 | GoMVS:多视图几何重建新SOTA
IROS2022 | 我们准备好进行鲁棒且有弹性的SLAM了吗?
【ECCV2022】SOTA!MeshLoc:基于网格的视觉定位
香港大学最新!ROG-Map:一种基于LiDAR的高效机器人中心占用网格地图
速度超快!激光雷达序列的在线分割:数据集和算法(ECCV2022)
这可能是B站最全面的【3D点云+三维重建】教程!原理解读+实战分析,迪哥带你一口气学完!计算机视觉
2022最新!基于激光雷达的3D目标检测综述(超全数据集和SOTA方法汇总)
【B站强推!】这可能是B站目前唯一能将【3D点云+三维重建】讲清楚的教程了,看完小白也能信手拈来,建议收藏!计算机视觉|点云
医学图像三维重建Demo OpenCV Qt VTK CT图像三维重建
轨迹预测到底预测个啥???轨迹预测入门必备!
为自动驾驶构建城市规模的神经辐射场
【IROS2022】联合学习结合语义分割!啪!泛化性这不就来了么~
ICCV 2023 | CVRecon:重新思考神经重建中三维几何特征学习
轨迹预测真正重要的什么?又或者说实际落地的难点在哪里?
3D目标检测的数据标注/算法讲解/训练调优全系列闭环
端到端自动驾驶:SparseDrive 算法详解
速度快!MobileNeRF:移动端实时渲染方案,Nerf导出Mesh