V
主页
京东 11.11 红包
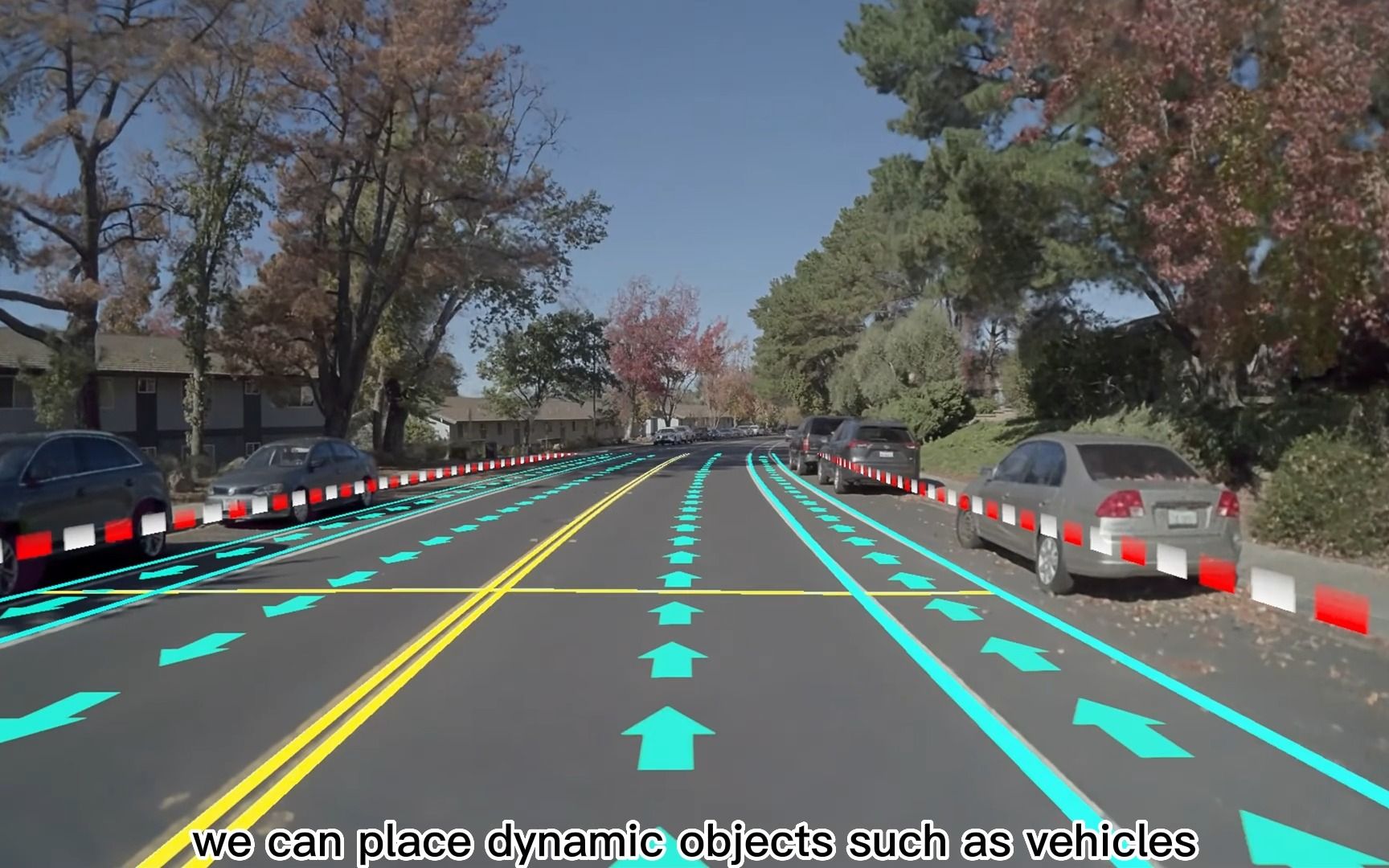
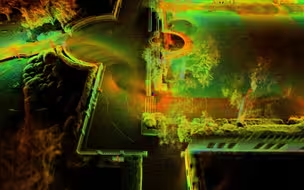
Nvidia强大的神经重建引擎:场景重建和事件注入(Neural Reconstruction Engine,NRE)
发布人
关注公众号【自动驾驶之心】,后台回复“NRE”获取视频链接!
打开封面
下载高清视频
观看高清视频
视频下载器
英伟达提出EmerNeRF:大规模动态自动驾驶场景重建
NeurlPS'24 开源 | DC-Gaussian,基于3DGS的行车记录仪视频场景重建,有效去除反射遮挡
ICCV 2023 | NeO 360: 用于户外场景稀疏视图合成的神经场
ICCV 2023 | CVRecon:重新思考神经重建中三维几何特征学习
ETH最新!CVPR2024 | GoMVS:多视图几何重建新SOTA
逆天了!NeRF-Casting:逼真重建和渲染高光泽目标
特斯拉的World Model是什么?怎么做端到端训练?
速度提高60倍!重建你的自动驾驶场景 | GaussianCity:无边界三维城市场景重建(南洋理工大学)
为自动驾驶构建城市规模的神经辐射场
CVPR2023 | 利用神经辐射场提升全景三维场景理解的能力
超逼真的数据!实时高质量渲染,用于动态城市场景建模的Street Gaussians
Hydra MDP | 英伟达如何理解端到端自动驾驶?
太详细了!多传感器融合的策略和方法
CVPR'23 | OCTraN:非结构化交通场景中的3D占用卷积Transformer网络
端到端算法是什么?自动驾驶领域是怎么做的?
计算效率提升20% | 直接LiDAR-惯性里程计:具有连续时间运动校正的轻量级LiDAR-惯性里程计
路径规划|基于维诺图的路径规划算法(ROS C++/Python/Matlab实现)
自动驾驶绕不开的仿真!LightSim:从零开始搭建一个真实、可控、可扩展的自动驾驶仿真平台
在线高精地图 | TopoMLP:驱动拓扑推理的简单而强大的pipeline
端到端趋势下,传统规控还有未来么?
浙江大学最新 | BEVPlace++:激光雷达全局定位方法,超越当前SOTA!泛化性能极佳
【ICRA 2023 | 首篇研究LiDAR基础设施部署的工作!作者亲自带你玩转传感器部署策略】第3节:车路协同场景激光雷达部署策略优化方法
LeTS-Drive:自动驾驶中不确定场景下的实时路径规划算法
端到端算法有哪些优势?完爆传统感知规控?
Depth Anything V2 | 速度提升10倍以上!更稳健、精细的单目深度估计(HKU&TikTok)
一文尽览:自动驾驶大语言模型应用综述分享
端到端基础!绕不开的感知模块
TPVFormer:特斯拉occupany network的学术替代方案!清华大学工作
YOLOv7 + Strong Sort在高速场景视频上表现超赞
CVPR 2023 | OrienterNet:基于神经匹配的2D公共地图视觉定位
大火的BEVFusion算法详解
ICCV 2023 | Point-SLAM:基于密集神经点云的SLAM!
Pyramid Diffusion:精细生成3D大场景,自动驾驶高质量数据来了
绝对前沿!全面剖析自动驾驶具身理解任务!
端到端数据格式是什么样的?快来看看吧
清华大学&英伟达 | DriveEnv-NeRF:基于NeRF实现高逼真自动驾驶场景,离线测试!
最近一个月,Occupancy领域有哪些值得关注的工作?
自动驾驶规控工程师必备技能点!Coupling Trajectory Planning是个啥?
港科技最新SLAM数据集!SLABIM:香港科技大学主楼SLAM-BIM耦合数据集
聊一聊4D成像雷达在辅助驾驶领域的应用