V
主页
ECCV2022 workshop | 自动驾驶中的自监督学习part1(数据处理、深度估计、3D检测/跟踪、SLAM、定位等!)
发布人
ECCV2022 workshop | 自动驾驶中的自监督学习part1(数据处理、深度估计、3D检测/跟踪、SLAM、定位等!)
打开封面
下载高清视频
观看高清视频
视频下载器
ECCV2022 workshop | 自动驾驶中的自监督学习part2(数据处理、深度估计、3D检测/跟踪、SLAM、定位等!)
高精地图制作关键技术及领域主流方案分享-part1
跟知乎大V一起来学BEV!视觉BEV感知和跟踪算法详解
大火的BEVFusion算法详解
WACV 2022 | SIDE:具有结构感知实例深度估计的基于中心的立体3D目标检测器
Nerf+SLAM会擦出什么样的火花?
自动驾驶多传感器数据融合(4):多目标跟踪算法
太详细了!多传感器融合的策略和方法
看完缓解了我的技术焦虑!自动驾驶的产线标定以及标定间标定方法
毫米波雷达视觉到底是怎么融合的?CenterFusion你搞懂了吗?
自动驾驶 3D LiDAR目标跟踪技术实现细节大揭秘!
自动驾驶多传感器数据融合(2):IMU和GPS的融合定位
3D目标检测的数据标注/算法讲解/训练调优全系列闭环
宏景智驾 | 通过3DBEV实现模拟目标检测、建图和定位
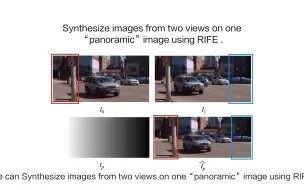
【ECCV2022】提速27倍!视频帧插值的实时中间流估计
2022最新!基于激光雷达的3D目标检测综述(超全数据集和SOTA方法汇总)
超全干货 | 自动驾驶中的传感器融合:前融合+后融合+特征级融合(方法与策略)
在线高精地图 | TopoMLP:驱动拓扑推理的简单而强大的pipeline
CVPRW 2023 | 一种新的RGB+深度3D数据集,用于长范围目标跟踪应用
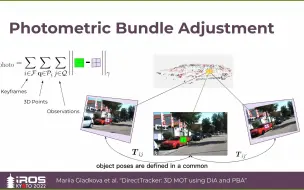
最新3D多目标跟踪方法DirectTracker:基于直接图像对齐和光度学束调整的3D多目标跟踪(IROS2022)
自动驾驶多传感器数据融合(1):什么是多传感器融合?
ECCV 2022最新 | DynamicDepth:无监督多帧单目深度估计新SOTA!
自动驾驶仿真框架CARLA教程(6):Longer-term model results
泰裤辣!谷歌最新,一次跟踪所有目标!Everything and everywhere
地平线最新SOTA!Sparse4D:迈向长时序稀疏化3D目标检测的新实践
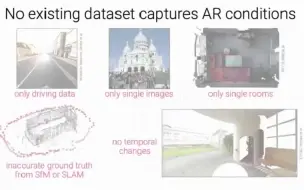
【ECCV 2022】 获取的真值更准确!LaMAR:AR中的定位和建图新基准
ECCV2022 | Box2Mask:强!mAP-50达到全监督97%!
世界模型!特斯拉CVPR2023 Workshop!
ICCV 2023 Workshop | 自动驾驶3D目标检测距离的经验分析
500公里超大型SLAM数据集!多视觉异步SLAM系统(ICRA 2021)
自动驾驶如何学好C++?
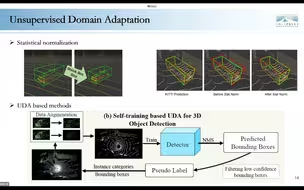
3DTrans | 自动驾驶的可迁移性探究!
看到了这个视频,彻底搞懂了PETR算法!
什么是端到端自动驾驶?什么是基础world model?
ECCV 2022 Workshop: 自动驾驶视觉感知分享
数据为王!自动驾驶开源数据体系现状与未来
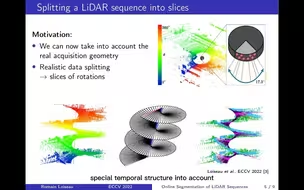
速度超快!激光雷达序列的在线分割:数据集和算法(ECCV2022)
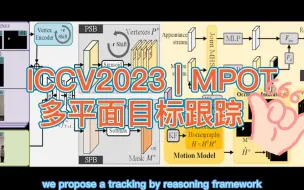
ICCV2023 | MPOT:多平面目标跟踪
IROS2022 | 毫米波雷达和相机融合在高分辨率和远距离深度成像中的探索
【WACV2023】即插即用!频率感知自监督深度估计SOTA!