V
主页
3D目标检测的数据标注/算法讲解/训练调优全系列闭环
发布人
1、Xtreme1 引言 2、如何标注、治理自动驾驶的融合数据 3、自动驾驶3D目标检测入门与实践
打开封面
下载高清视频
观看高清视频
视频下载器
视觉3D检测如何做自动标注?
毫米波雷达-视觉融合感知方法(前融合/特征级融合/数据级融合)
内卷时代如何降低自动驾驶数据的标注成本?双域主动学习可能是答案!
使用YOLOv4完成激光雷达点云下的3D目标检测!
2022最新!基于激光雷达的3D目标检测综述(超全数据集和SOTA方法汇总)
MMdetection3D保姆级安装教程!从环境配置到项目实战,手把手带你玩转最新一代3D目标检测平台—MMdetection3D(深度学习/计算机视觉)
自动驾驶仿真框架CARLA教程(1):用Carla和Python编程自动驾驶汽车
大火的BEVFusion算法详解
从0到1!彻底搞懂BEVFormer算法原理
跟知乎大V一起来学BEV!视觉BEV感知和跟踪算法详解
地平线最新SOTA!Sparse4D:迈向长时序稀疏化3D目标检测的新实践
mmyolo从环境部署到训练自己的数据集,手把手带你玩转YOLO系列开源工具箱—MMyolo!(深度学习/计算机视觉/目标检测)
以特斯拉为案例:自动驾驶仿真框架分析(上,数据搭建/场景建模)
大牛带你彻底搞懂UltraFastLane车道线检测算法(一)
Nuscenes、KITTI等多个BEV开源数据集介绍!
宏景智驾 | 通过3DBEV实现模拟目标检测、建图和定位
【多模态3D目标检测+对比学习】1小时跟着Meta博士理解对比学习!医学图像文本/Openai CLIP模型/Dalle-2
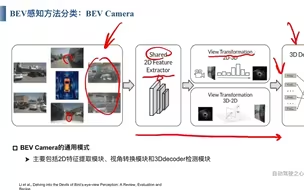
纯视觉/多传感器融合方案!BEV感知方法分类
决策规划都有哪些框架?PNC今年的香饽饽!近10种规控算法与代码实现你都知道吗?
【CVPR2023】 自动驾驶场景下理解BEV目标检测的鲁棒性
【ECCV2022】首篇完全可微NeRF!Neural-Sim:学习使用NeRF生成训练数据(微软)
自动驾驶如何学好C++?
83FPS,史上最快 | IA-SSD: 基于point方式的高效激光雷达点云3D目标检测网络(CVPR2022)
高精地图制作关键技术及领域主流方案分享-part1
数据为王!自动驾驶开源数据体系现状与未来
基于激光雷达的车道线检测实现
【IROS 2022】超大规模环视鱼眼数据集!SynWoodScape:8万张图像,十多个任务标注(检测/分割/深度/光流/事件等)
看完缓解了我的技术焦虑!自动驾驶的产线标定以及标定间标定方法
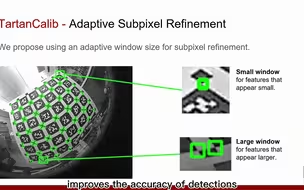
开源广角相机标定!TartanCalib:基于AprilTags自适应亚像素细化的迭代广角镜头标定(卡内基梅隆大学)
自动驾驶多传感器数据融合(2):IMU和GPS的融合定位
轻舟智航最新成果!PillarNeXt:LiDAR点云中的3D检测网络如何设计?
CVPR 2023 | BEVHeight:基于视觉的道路3D目标检测的鲁棒框架
2022最新 | HybridNets:端到端感知网络(检测+可行使区域分割+车道线三大任务)
什么是端到端自动驾驶?什么是基础world model?
看到了这个视频,彻底搞懂了PETR算法!
重磅开源!MARS:基于隐式场的场景感自动驾驶仿真
速度和精度双SOTA! TPAMI 2022最新车道线检测算法(Ultra-Fast-Lane-Detection-V2)
500公里超大型SLAM数据集!多视觉异步SLAM系统(ICRA 2021)
自动驾驶多传感器数据融合(3):单目标跟踪算法
YOLO-PYQT可视化终于支持YOLOV8、RTDETR!内部还支持目标跟踪功能!毕设必备!