V
主页
京东 11.11 红包
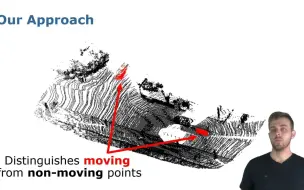
速度超快!激光雷达序列的在线分割:数据集和算法(ECCV2022)
发布人
公众号【自动驾驶之心】后台回复【在线分割】获取论文和代码链接!车顶安装的旋转激光雷达传感器被自动驾驶车辆广泛使用。然而,大多数用于LiDAR序列分割的语义数据集会导致采集延迟与实时应用不兼容。为了解决这个问题,论文首先介绍了HelixNet,这是一个100亿点的数据集,它包含细粒度标签、时间戳和传感器旋转信息,这些信息对于准确评估分割算法的实时就绪性是必要的。其次,提出了Helix4D,一种紧凑高效的时空transformer架构,专门为旋转激光雷达序列设计。Helix4D在采集切片上运行,对应于整个传感器旋转的一小部分,显著降低了总延迟。Helix4D的准确度与HelixNet和SemanticKITTI上的最佳分割算法不相上下,延迟和模型大小分别减少了5倍和50倍!
打开封面
下载高清视频
观看高清视频
视频下载器
自动驾驶中的激光雷达点云分割-part2
详解!基于Camera和基于激光雷达的自动驾驶系统区别!
Lidar vs. Tesla:自动驾驶路线之争!激光雷达还是纯视觉?
SemanticKITTI SOTA!激光雷达数据中的运动目标分割(IROS2022)
在线高精地图 | TopoMLP:驱动拓扑推理的简单而强大的pipeline
用于激光雷达视图合成和三维重建的瞬态神经辐射场
MonoPLFlowNet:用于单目图像的现实尺度 3D 场景流估计(ECCV2022)
华为正研发 ADS 4.0 平台,激光雷达等核心零部件成本进一步下降#华为#自动驾驶#电动汽车
无监督域适应3D检测SOTA!让激光雷达奔跑起来~
ECCV2022 workshop | 自动驾驶中的自监督学习part1(数据处理、深度估计、3D检测/跟踪、SLAM、定位等!)
逆天了!新加坡国立最新 | 分割任意3D物体
IROS2022 | 毫米波雷达和相机融合在高分辨率和远距离深度成像中的探索
激光雷达,要被淘汰了?
牛津大学IROS2023最新!激光雷达相机外参标定新算法(大幅降低误差)
大火的BEVFusion算法详解
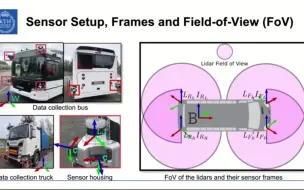
【ICRA 2023 | 首篇研究LiDAR基础设施部署的工作!作者亲自带你玩转传感器部署策略】第3节:车路协同场景激光雷达部署策略优化方法
TensorRT部署车道线检测最强算法!Ultra-Fast-Lane-Detection-V2
量产基石!MapTR:在线高精地图经典开山之作
相机和激光雷达融合的多车辆跟踪demo
端到端数据格式是什么样的?快来看看吧
通过Intel Realsense 3D激光雷达完成SLAM任务!(性价比超高)
ICRA2023 | 激光雷达相机内外参联合标定方案!
【ECCV2022】SOTA!MeshLoc:基于网格的视觉定位
白天图像变夜晚数据SOTA方法| ManiFest:图像翻译新思路!(ECCV2022)
ECCV2024 | 训练45秒,渲染300+FPS!MVSGaussian:高效且可泛化的混合高斯渲染方法
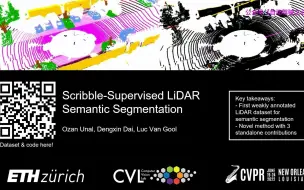
CVPR2022 oral | 弱监督Lidar点云分割SOTA!8% 标注数据下达到 95.7% 的全监督性能!
麻省理工团队 | Fast-LiDARNet:基于激光雷达的高效鲁棒端到端导航框架
M-LIO:提升传感器信号丢失容忍度的多激光雷达和多IMU里程计
【ECCV2022】首篇完全可微NeRF!Neural-Sim:学习使用NeRF生成训练数据(微软)
ECCV2022 | 高效视觉transformer中的自适应token采样!
自动驾驶最新仿真算法 | KING:通过运动学梯度生成安全关键驾驶场景以进行稳健模仿(ECCV 2022)
毫米波雷达-视觉融合感知方法(前融合/特征级融合/数据级融合)
高精地图制作关键技术及领域主流方案分享-part1
在线高精地图与城市NOA是什么关系?为什么如此重要?
使用labelme制造自己的语义分割、目标检测数据集,制造标签详细教学
国产激光雷达厂商称霸,但激光雷达产业前景依旧严峻,如何开拓汽车场景外的新兴市场?
源码实战!使用RealSense和Jetson Nano完成YOLOv7部署
2022最新!基于激光雷达的3D目标检测综述(超全数据集和SOTA方法汇总)
自动驾驶多传感器数据融合(3):单目标跟踪算法
自动驾驶的经济学!