V
主页
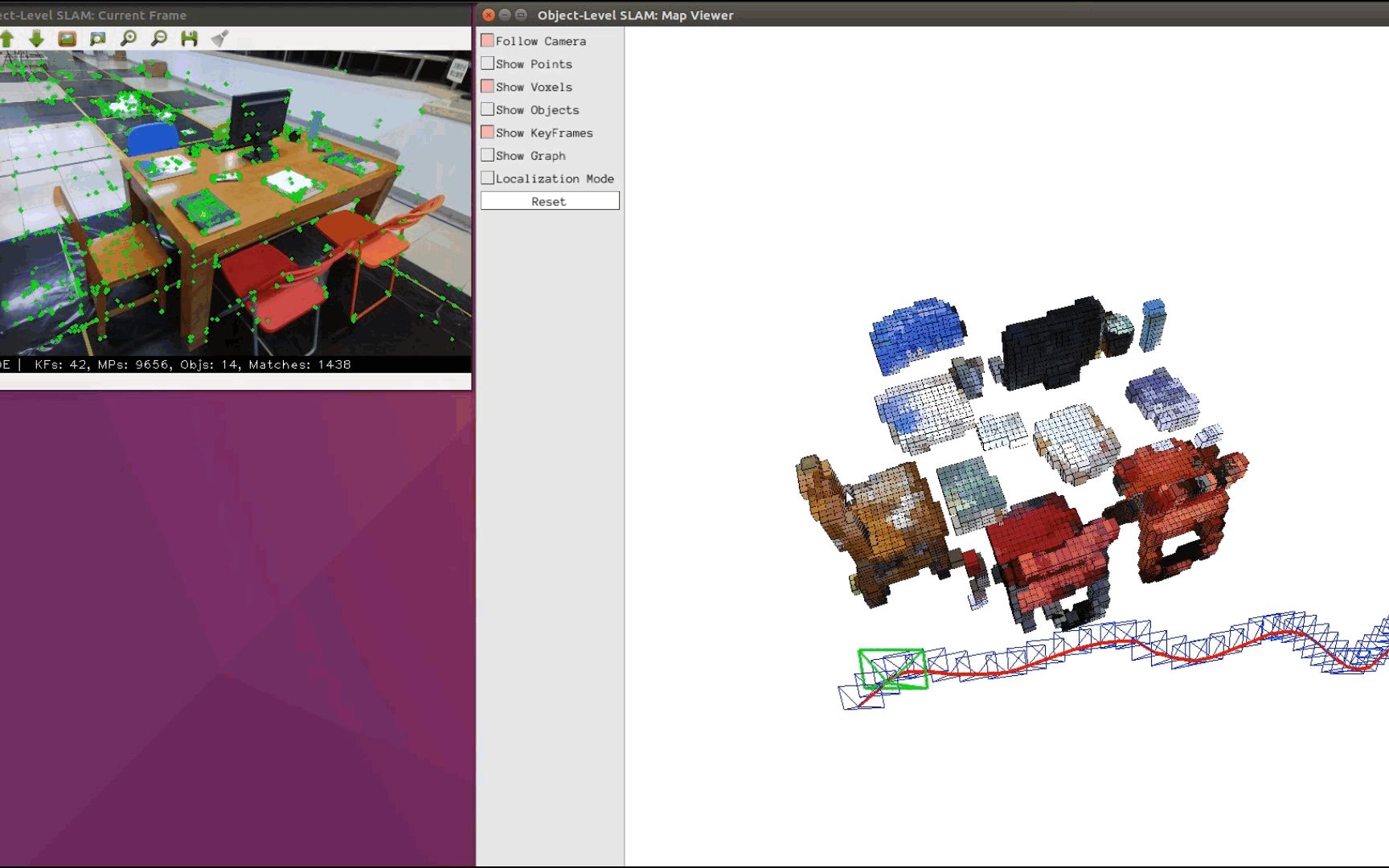
【前沿论文】中科大丨用于闭环的物体语义建图,IROS 2021
发布人
https://mp.weixin.qq.com/s/65AVoxtpKone99JPTByGNA
打开封面
下载高清视频
观看高清视频
视频下载器
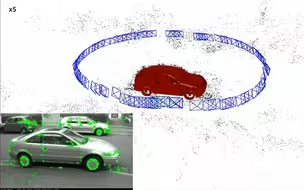
开源!伦敦大学学院丨物体级语义SLAM :DSP-SLAM,3DV 2021
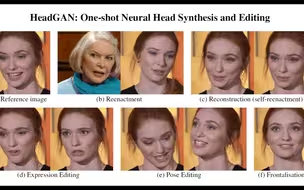
【前沿论文】帝国理工&华为提出头部合成和编辑算法,ICCV 2021
100+小时,45000m²的覆盖面积!首个用于AR的定位和建图基准!ETHZ等新开源,ECCV2022!
CVPR24 最佳学生论文:实现3DGS新突破,任意尺度无锯齿渲染!三名华人学者参与!
2021年度盘点:十大最佳开源SLAM算法!
【全122集】冒死上传!CNN、RNN、GAN、GNN、DQN、Transformer、LSTM等八大深度学习神经网络一口气全部学完!
哈工大、北师大、清华开源!逼真的3DGS人体化身
【最新技术】ANYmal C 机器人自主探索地下矿井
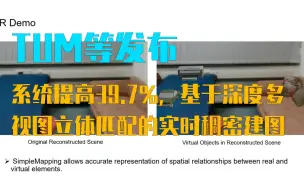
TUM&MCML发布|系统提高39.7%,基于深度多视图立体匹配的实时稠密建图!
中科大新发布|轻量级神经路径规划,高效、低成本的机器人导航方法!
可以在飞行中躲避快速移动物体的无人机
OpenCV入门到进阶!一口气学完图像处理、目标检测、物体识别、图像分割、三维重建、医学影像!存下吧,真的比啃书好多了!(机器学习/深度学习/计算机视觉)
CVPR2024最佳学生论文太强了!中国学生的榜样!这篇论文强烈建议所有学生好好阅读,入门复现!
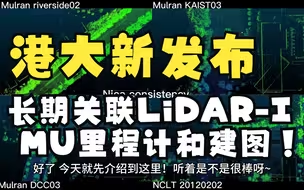
港大新发布|多会话模式,长期关联LiDAR-IMU里程计和建图!
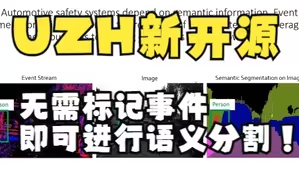
首个具有详细标签的大规模数据集!比现有方法高出6.35%mloU! UZH新开源无需标记事件,即可进行语义分割!ECCV 2022
谷歌机器人子公司Intrinsic最新开源机器人抓取,无需收集数据或人工标注! ICRA 2022
【SLAM前沿讲座】多伦多大学|用于解锁视觉导航的动态相机
【六哥答疑】入门视觉SLAM,需要了解什么框架?
ETHZ新开源|实时检测复杂环境中的运动物体,Dynablox方法突破性能!
360度多层建筑定位和建图!
浙大最新开源|大规模场景渲染,用于自动驾驶3D场景!
太酷了!手持激光雷达,即可在线实时重建点云!牛津大学最新发布,可用于森林调查!
【SLAM前沿讲座】Tim Barfoot |机器学习在哪里可以帮助机器人进行状态估计?
香港大学开源FAST-LIO简介,对比及学习方法(附详细解读文档!)
【开源代码】SG-Net: 单阶段视频实例分割效果展示丨CVPR2021
【硬核课程】ORB-SLAM2答疑:特征提取/匹配、图结构、地图初始化、跟踪、局部建图
2022年度盘点:十大最佳SLAM开源算法
UZH新发布|实现47.2%的平均精度,事件相机的RTV用于目标检测!CVPR2023
仅需3张图像即可合成逼真新视图,学习NeRF并优化相机姿态!ETHZ&Google等开源,CVPR2023
UCLA发布|效率提高20%,可快速且并行逐点去斜的里程计!
【即将开源】SIGGRAPH 2022|有玻璃场景的新视图合成,解决了物体的折反射问题,比NeRF更高清!MPII&DTU等新发布
【带你读论文】S-MSCKF论文及算法框架详细解读
深度学习三维重建学习计划
NeRF又来了!可随意捕捉,支持用户以交互方式分割物体!
逼真!视图合成新方法,比已有方法快1000多倍!CVPR2021
【已完结】这可能是B站目前唯一能将【3D点云+三维重建】讲清楚的教程了,原理解读+实战分析,迪哥一次性全讲明白!—人工智能/神经网络/深度学习
【SLAM前沿讲座】MIT|SLAM的过去、现在和未来
当AI被用来盗取视频,会有多可怕?
【直播回放】让机械臂自己学会6自由度抓取操控,代码已开源!
CMU & ICRA22 UAV俯瞰视觉定位竞赛亚军技术方案分享|中国科学技术大学