V
主页
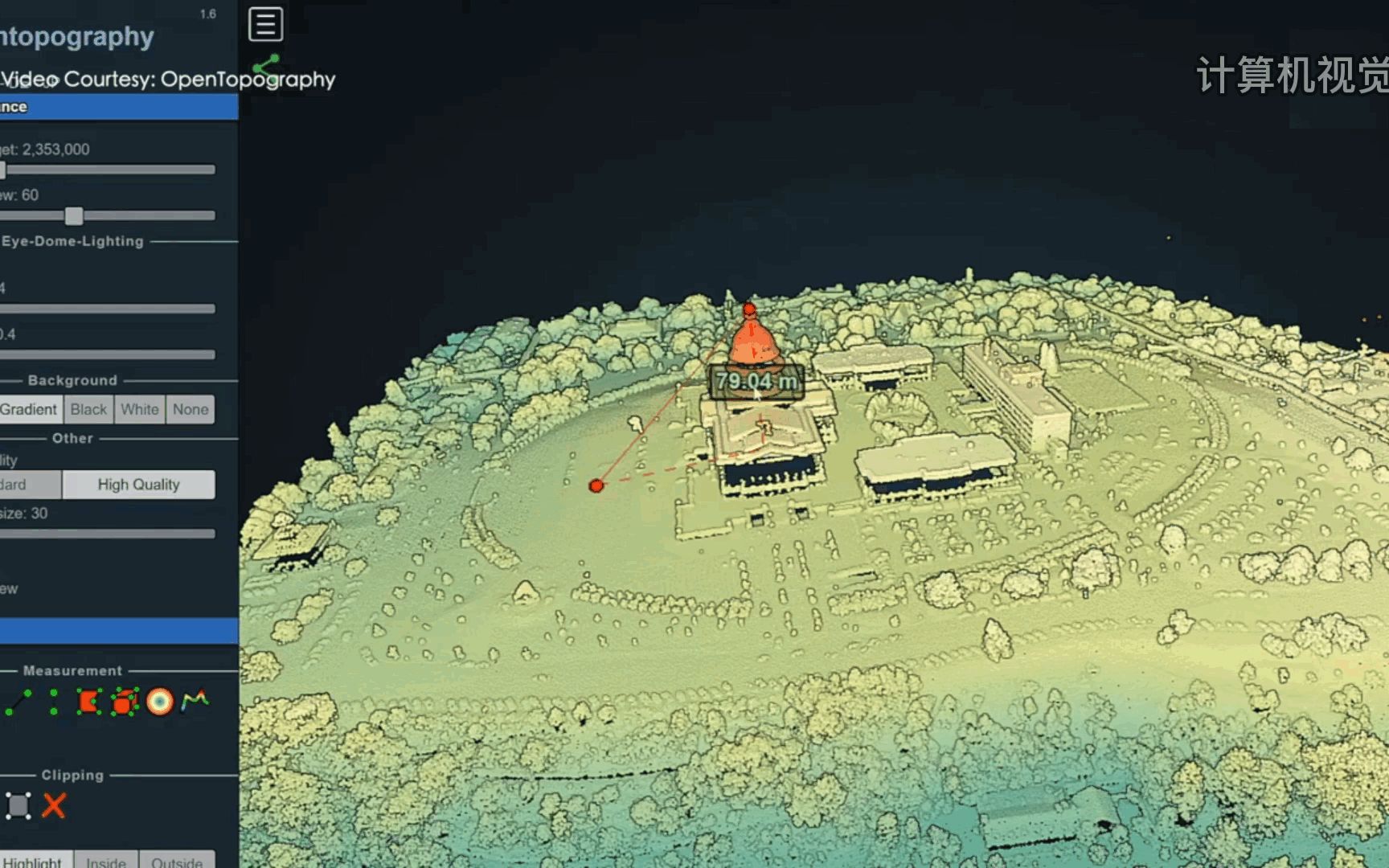
收藏不亏!4个地方,可获得开放的激光雷达数据!
发布人
https://www.youtube.com/watch?v=-tAFI_3jtas&t=11s 【计算机视觉life】:专注计算机视觉、三维视觉、SLAM领域,分享机器人、自动驾驶、AR领域最新技术 欢迎加入技术交流群一起和同行交流,入群请添加此微信号:chichui502 ,备注:“名字+学校/公司+研究方向”。
打开封面
下载高清视频
观看高清视频
视频下载器
最新开源|支持惯性、激光雷达、双目和RGB-D传感器的系统!
RTK全站仪实测坐标数据导入CAD、CASS中
大疆禅思 L2 产品小课堂(3) - 点云数据处理
夜间试驾昊铂HT 24款激光雷达版,从市中心万达广场出发,NDA辅助驾驶上城市快速路,整体算很丝滑,进步很快。
【入门必看】视觉惯性SLAM“灭霸”:ORB-SLAM3
华科大最新工作分享:基于激光雷达-惯导-轮速计的联合状态估计!
IROS 2021大牛团队最新开源!深度学习三维激光雷达动态物体分割
南方CASS中DAT数据生成及转换XYH
瑞典皇家理工博士分享开源算法: 点云地图动态障碍物去除基准
牛津大学发布!可扩展激光雷达NeRF SLAM,时间节省一半!
给我一分钟教会你编辑道路横断面
真正可用!灵光Lixel的实时点云有多靠谱?|手持激光雷达手持slam
地下矿井巷道SLAM三维重建激光雷达点云建模——So Easy!
真强!无需再训练,直接输入即可生成真实的LiDAR点云感知读数!UIUC最新开源,ECCV2022!
350km+的记录,cm级精度的数据集!用于自动驾驶的视觉长期定位!TUM开源!
可以在飞行中躲避快速移动物体的无人机
加速道路资产盘点,灵光Lixel助力交通管理智能化| 手持激光雷达
试驾昊铂HT 24款激光雷达版,整体基本上可以实现A点到B点自动驾驶通行了,但路况复杂的路段仍要手工接管,否则通勤效率会降低
OCC中点云太过稀疏?这些方法一定有用!
彩电大沙发+激光雷达,15.58万起售的零跑C16有点东西
测量自动成图步骤,以及相关小工具的应用。
Rhino 8 犀牛 点云的抽稀——方便快速加载画图
大疆禅思 L2 产品小课堂(2) - 产品功能方案
科研经历分享—基于不确定性分析的LIDAR位姿图优化
【硬核课程】ORB-SLAM2重点梳理1:特征提取/匹配、图结构、地图初始化、跟踪、局部建图
一个视频告诉你激光雷达的局限性
平地光伏放样,可以一键提取所有桩坐标,配合“自动最近”放样,可以每天多放100个点
【开源】基于激光点云的无监督类无关实例分割算法,RAL22!
纯视觉系统和激光雷达哪个好?迪哥精讲基于纯视觉系统的无人驾驶算法,论文解读+项目实战
控制网复测根据坐标高程生成导线成果报告
【最新技术】ANYmal C 机器人自主探索地下矿井
复杂环境下,基于Lidar的无人机自主飞行!港大最新发布!
2021年度盘点:十大最佳开源SLAM算法!
CMU & ICRA22 UGV大场景3D点云定位竞赛亚军技术方案分享|浙江大学
如何更高效学习GNSS、RTK定位?(含30+论文及两本电子书下载)!
【开源】UCLA提出轻量前端直接激光雷达里程计,针对弱算力平台!
因为塔尺引发的惨案
这个多模态SLAM可实现任意传感器数量松耦合,在GPS、视觉传感器失效时仍稳如老狗!
ICRA2022|浙大&商汤等发布紧耦合RGB-D视觉惯性VIP-SLAM,速度快2倍!
#航测 #大疆无人机 #航拍 普通大疆无人机如何将一张张小照片拼接成大图并可以对地面物体进行测量面积距离?