V
主页
ICRA2022|用于深度和高分辨率事件相机的实时视觉里程计框架
发布人
https://www.youtube.com/watch?v=RqAAA4MOqRI 他们提出了一种新的实时视觉里程计框架,用于深度和高分辨率事件相机的立体设置。他们的框架在准确性和鲁棒性与计算效率之间取得平衡,从而在具有挑战性的场景中实现强大的性能。他们将传统的基于边缘的半稠密视觉里程表扩展到从事件流获得的时间表面图。半稠密深度贴图是通过扭曲外部校准深度相机的相应深度值生成的。跟踪模块通过高效的几何半稠密3D-2D边缘对齐更新相机姿势。他们的方法在各种条件下捕获的公共和自收集数据集上都得到了验证。他们表明,所提出的方法在常规条件下的性能可与基于RGB-D相机的最新替代方案相媲美,并最终在高动态或低照度等具有挑战性的条件下表现出色。 论文地址:https://arxiv.org/pdf/2202.02556.pdf
打开封面
下载高清视频
观看高清视频
视频下载器
牛津大学|这个IMU+四个相机的视觉惯性里程计真不错!漂移率降低80%、相对位姿误差降低39%!
ICRA2022|浙大&商汤等发布紧耦合RGB-D视觉惯性VIP-SLAM,速度快2倍!
ICRA2022|单个360°相机的视觉里程计,无需校正即可获得全方位感知!港科大发布
VR、外骨骼、脑机接口的完美结合丨虚拟现实中用于运动图像脑-机接口的手外骨骼
UZH新发布|实现47.2%的平均精度,事件相机的RTV用于目标检测!CVPR2023
成本降低2倍,用于提高视觉变换器的自适应令牌采样!微软等最新开源,ECCV2022!
精度提高了9倍,允许结合多视角深度信息的单目里程计!萨戈大发布
350km+的记录,cm级精度的数据集!用于自动驾驶的视觉长期定位!TUM开源!
谷歌机器人子公司Intrinsic最新开源机器人抓取,无需收集数据或人工标注! ICRA 2022
清华等开源! EmbodiedSAM:实时在线分割任意3D物体
首个具有详细标签的大规模数据集!比现有方法高出6.35%mloU! UZH新开源无需标记事件,即可进行语义分割!ECCV 2022
双目VIO+点线特征+抗动态光照! 南洋理工最新开源!
哈工大发布|首个基于线特征的红外惯性里程计ETIO,性能超过了最先进的TIO!
MIT等开源|实时构建3D场景图,机器人探索大规模环境的空间感知算法!
【原创】优秀开源代码盘点:稀疏视觉SLAM/SfM
可以在飞行中躲避快速移动物体的无人机
波士顿动力机器人,要成精了!
ICRA2021最新开源!基于泊松三维重建的激光雷达里程计和建图!
浙大最新开源|大规模场景渲染,用于自动驾驶3D场景!
SIGGRAPH 2022|需6个视图,即可重建渲染动作!上科大,最新开源!
【即将开源】换头技术,它又双叒叕来了!比比哪家强?华南理工&百度最新研究HeSer实现动态换头!CVPR2022
强!秒变高清,视频纹理去除!港大等新开源,CVPR2022
清华深研院、哈工深发布!Lidar视觉紧耦合实时相对定位
牛津大学丨用于机器人安全导航的控制器丨[RA-L]
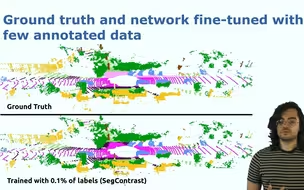
波恩大学最新开源代码!自动驾驶场景自监督三维点云表征学习,无需标注,RAL/ICRA 2022!
【前沿论文】中科大丨用于闭环的物体语义建图,IROS 2021
上海交大最新开源|GNSS/INS/Camera融合导航库GICI-LIB
IROS22|动态环境下,资源受限机器人的惯性里程计!哈工大最新开源!
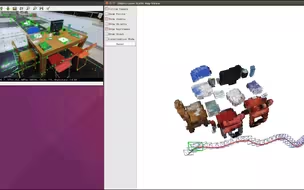
华盛顿大学与英伟达联合开源!用于大规模仿真环境和机器人运动控制
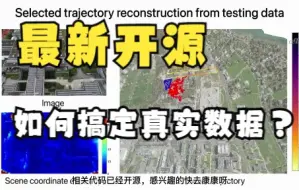
如何搞定真实数据?匹配的合成数据+跨模式表征学习即可!EPFL新开源,CVPR2022
苏黎世皇家理工等发布!带闭环稠密神经SLAM
Iphone 12+AR Kit面部捕捉,实时驱动机器人!表情真实,细节拉满!
【带你读论文】S-MSCKF论文及算法框架详细解读
【最新技术】一组照片变高清3D场景!实时显示超1亿像素点场景!电影和游戏重大利好!
ETH发布!轮腿式机器人的鲁棒自主导航与运动学习
ECCV2022|任意两帧之间均可插入,可实现27倍视频加速处理!旷视等最新开源
苏黎世大学开源!事件相机减轻神经辐射场中的运动模糊
如何更高效学习GNSS、RTK定位?(含30+论文及两本电子书下载)!
AR可以自动编故事了?输入故事即可转换为图形画面!GMU等发布,SIGGRAPH 2022!
代码及数据集均开源!苏黎世大学提出事件相机稠密光流估计算法,误差减少66%!3DV 2021