V
主页
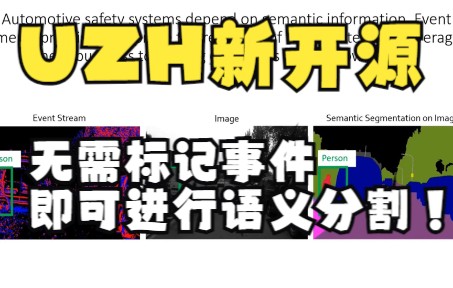
首个具有详细标签的大规模数据集!比现有方法高出6.35%mloU! UZH新开源无需标记事件,即可进行语义分割!ECCV 2022
发布人
https://www.youtube.com/watch?v=Tby5c9IDsDc 在这项工作中,我们引入了ESS,它通过无监督域自适应(UDA)将语义分割任务从现有的标记图像数据集直接转移到未标记事件来解决这个问题。与现有的UDA方法相比,我们的方法将循环的、运动不变的事件嵌入与图像嵌入对齐。因此,我们的方法既不需要视频数据,也不需要图像和事件之间的每像素对齐,更重要的是,不需要从静止图像中产生幻觉运动。此外,为了促进基于事件的语义分割的进一步研究,我们引入了DSEC语义,这是第一个具有细粒度标签的大规模基于事件的数据集。我们表明,单独使用图像标签,ESS优于现有的UDA方法,当与事件标签结合使用时,它甚至在DDD17和DSEC语义方面优于最先进的监督方法。最后,ESS是通用的,它解锁了大量现有的标记图像数据集,并为以前事件摄像机无法进入的新领域中的新的和令人兴奋的研究方向铺平了道路。 代码地址:https://github.com/uzh-rpg/ess 论文地址:https://rpg.ifi.uzh.ch/docs/ECCV22_Sun.pdf 数据集地址:https://dsec.ifi.uzh.ch/dsec-semantic/
打开封面
下载高清视频
观看高清视频
视频下载器
谷歌机器人子公司Intrinsic最新开源机器人抓取,无需收集数据或人工标注! ICRA 2022
ECCV 2024 AI涨点神器!超越DINOv2!显著提升语义分割、深度估计性能!
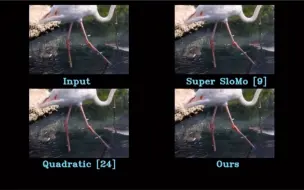
ECCV2022|任意两帧之间均可插入,可实现27倍视频加速处理!旷视等最新开源
香港理工最新开源|实时LiDAR定位与Mesh建图,首个基于CPU的实时激光雷达SLAM系统!
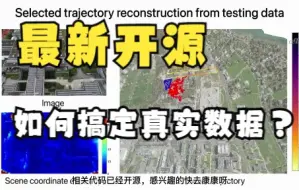
如何搞定真实数据?匹配的合成数据+跨模式表征学习即可!EPFL新开源,CVPR2022
无需微调,即可进行场景特征匹配!CTU最新开源,ECCV2022
CVPR2022|亚马逊和UB即将开源EfficientVIS:端到端高效视频实例分割,无需任何数据关联!训练时间减少了15倍!
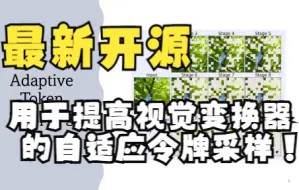
成本降低2倍,用于提高视觉变换器的自适应令牌采样!微软等最新开源,ECCV2022!
Meta开源「分割一切」2.0模型,视频也能分割了!
双目VIO+点线特征+抗动态光照! 南洋理工最新开源!
如何让美颜风格化后图像现原形?港科大最新图像复原方法!AAAI 2022
Ubody开源人体三维源数据集-smplx-三维建模-姿态估计
中科大新发布|轻量级神经路径规划,高效、低成本的机器人导航方法!
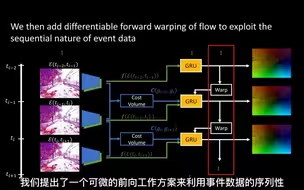
代码及数据集均开源!苏黎世大学提出事件相机稠密光流估计算法,误差减少66%!3DV 2021
ICRA2022|用于深度和高分辨率事件相机的实时视觉里程计框架
太厉害了 已跪!终于有人能把OpenCV图像处理讲的这么通俗易懂了,现在计算机视觉opencv全套分享给大家。
ECCV2022|端到端多视图重建HDR辐射场,即将开源!
LLAMA3.1 中文数据集微调效果如何?
人物消失术!ICCV2021开源丨隐式远程传播内部视频修复
ECCV2022|视频风格自由变换!华中大等开源!
AR可以自动编故事了?输入故事即可转换为图形画面!GMU等发布,SIGGRAPH 2022!
TUM等发布|拥挤环境下,帮助行人检测和跟踪!超大规模数据集!
仅需73ms即可重建一帧,无需3D卷积的3D重建!UCL等最新开源,ECCV2022!
人体视图合成新方法HVS-Net!使用单视图、稀疏的RGB-D输入
ECCV2020 | 华为最新插帧算法让视频如丝般顺滑
强!秒变高清,视频纹理去除!港大等新开源,CVPR2022
1.2 如何快速学习开源代码?
开源!AI的移花接木大法!不止能“换头”!
【离谱】为什么有的计算机本科生就能发表顶会顶刊,但许多博士生却一篇都没有?|科研人,我建议你论文辅导/人工智能/SCI论文/CCF论文/论文写作/毕业论文
Meta开源SAM2模型:一键跟踪运动物体,速度比初代快8.4倍,解决过度分割、超越SOTA
学术大佬答疑解惑!关于语义激光SLAM,说不定有你想知道的!
开源!伦敦大学学院丨物体级语义SLAM :DSP-SLAM,3DV 2021
如何下载医学影像数据集
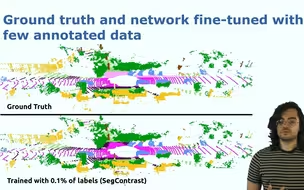
波恩大学最新开源代码!自动驾驶场景自监督三维点云表征学习,无需标注,RAL/ICRA 2022!
无外部设备下,可实现厘米级自主规避!港科大&大疆新开源!
听起来高深莫测的SLAM技术到底是啥?SLAM技术简介及入门方法
【即将开源】换头技术,它又双叒叕来了!比比哪家强?华南理工&百度最新研究HeSer实现动态换头!CVPR2022
华科、华为联合开源!实时动态场景4D高斯泼溅,最高 82fps!
误差降低40%以上,华为诺亚发布单目视觉动作捕捉算法CLIFF!最新开源,ECCV2022!
IROS2022|首个面向4D车载雷达的场景流估计,最新开源!