V
主页
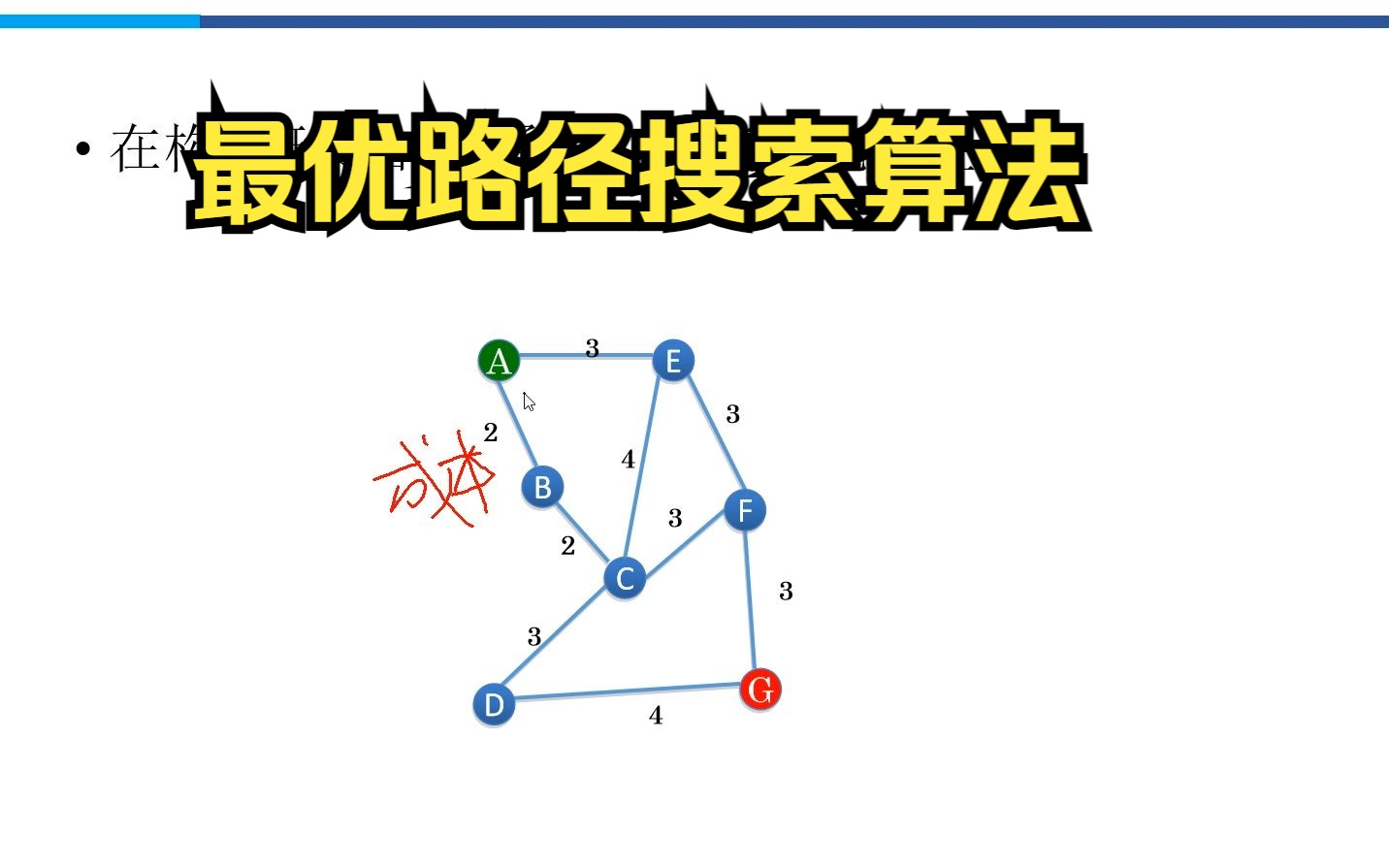
4-12最优路径搜索算法
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
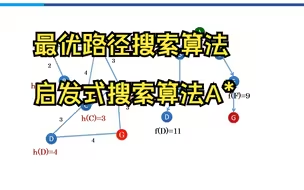
4-16最优路径搜索算法-启发式搜索算法A星
A星算法和人工势场法APF融合算法 子目标点 Astar 安全改进 不斜穿障碍物 多方向多动态障碍物 apf 改进路径规划 A*改进 astar 动态融合算法
ROS仿真 移动机器人导航 路径规划 运动控制
4-15最优路径搜索算法-Dijkstra算法
4-3路径规划
自动驾驶路径规划与控制-pure pursuit/PID/stanley控制实现
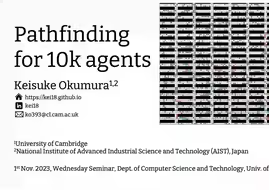
一万台规模以上的多智能体寻路:完备和最优的LaCAM*算法碾压CBS各个变种
4-18避障规划
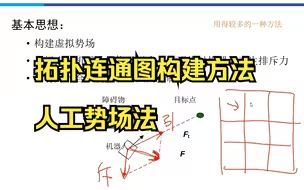
4-8拓扑连通图构建方法-人工势场法
ROS 颜色目标识别与定位的 C++ 实现
【Webots仿真寄录】三角舵轮-路径规划与控制
2024.7.2-保留障碍物建图
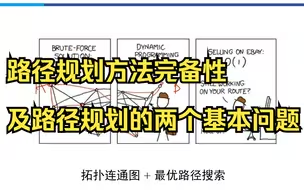
4-5路径规划方法完备性及路径规划的两个基本问题
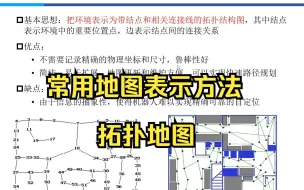
5-6常用地图表示方法-拓扑地图
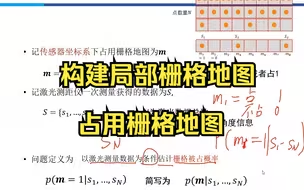
5-9构建局部栅格地图-占用栅格地图
[强化学习]自动驾驶路径规划与控制-DQN/DDPG+pure pursuit路径跟踪实现
00 移动机器人定位与导航/移动机器人技术基础-课程简介
路径规划|更平滑的Theta*算法(ROS C++/Python/Matlab)
【Python】控制算法——自适应控制
4-11拓扑连通图构建方法--概率完备(RRT法的改进RRT)
【UE蓝图进阶】02 四叉树在蓝图里的应用 | 聚合 | 空间查询 | 路径规划
3-33腿足式移动机器人
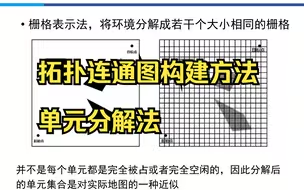
4-7拓扑连通图构建方法-单元分解法
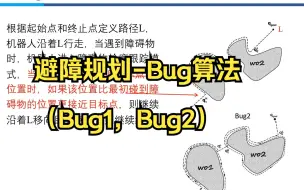
4-19避障规划-Bug算法(Bug1,Bug2)
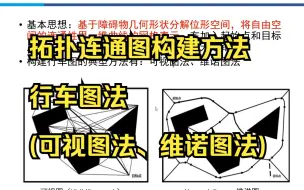
4-6拓扑连通图构建方法--行车图法(可视图法、维诺图法)
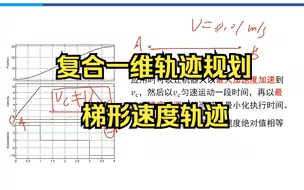
4-29复合一维轨迹规划-梯形速度轨迹
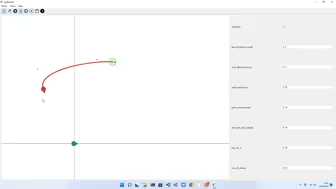
一个简单的基于贝塞尔曲线的路径规划控制器
6-1路径描述及轨迹生成
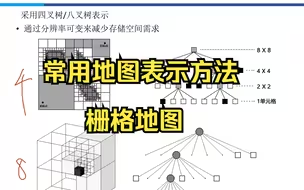
5-4常用地图表示方法-栅格地图
4-4工作空间与位形空间
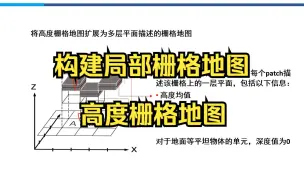
5-10构建局部栅格地图-高度栅格地图
2-00软件定义
4-35移动机器人平面运动轨迹规划方法-参数优化法
大部分打工人最终的结局,早已注定
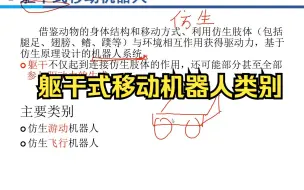
3-30躯干式移动机器人类别
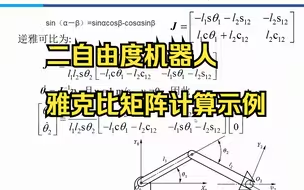
4-3二自由度机器人雅克比矩阵计算示例
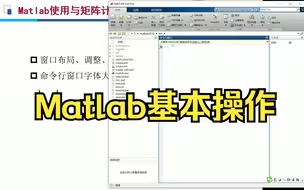
2-Matlab基本操作
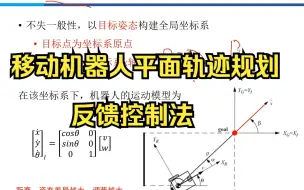
4-36移动机器人平面运动轨迹规划方法-反馈控制法
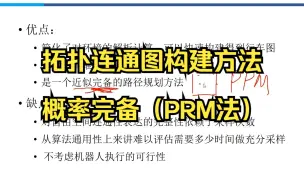
4-9拓扑连通图构建方法--概率完备(PRM法)
4-17最优路径搜索算法-准启发式搜索算法:蚁群算法