V
主页
京东 11.11 红包
激光雷达点云采集原理以及在自动驾驶中的应用(中文字幕)
发布人
该视频形象地展示了激光雷达点云采集的过程,以及在自动驾驶中的应用。
打开封面
下载高清视频
观看高清视频
视频下载器
CVPR2024 | RCBEVDet:毫米波雷达-相机在BEV空间下的融合方案
ICRA | 2024:牛津大学针对NeRF和激光雷达的缺点,提出了NeRF融合激光雷达SLAM的大场景重建系统
高翔SLAM报告:开阔高动态区域的激光融合定位
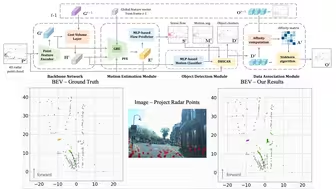
ICRA'2024 | 最新开源!RaTrack4D:使用4D雷达点云进行移动物体检测和跟踪
多传感器融合感知
ECCV 2024 英伟达提出SAL:激光雷达分割一切!自动驾驶感知新技术!
3D Gaussian Splatting在自动驾驶中的应用——建模动态城市场景
【2024已完结】这可能是B站目前唯一能将【3D点云+三维重建】讲清楚的教程了,原理解读+实战分析,迪哥一次性全讲明白!—人工智能/神经网络/深度学习
基于三维点云场景的语义及实例分割
融合人与环境的激光雷达三维动态场景感知 | 王程
多伦多大学等发布!面向LiDAR点云的无监督目标检测
ECCV'24 oral | DVLO,首个基于深度聚类的多模态融合,双向结构对齐的融合网络新SOTA
ICRA2020 | 多传感器融合实现点云地图构建 R-LINS
深度学习在点云识别中的应用
清华最新综述:第一个专门针对NeRF在自动驾驶领域应用的调查,旨在弥补当前文献中存在的明显空白
路径规划|基于维诺图的路径规划算法(ROS C++/Python/Matlab实现)
完美性能PMCW雷达
重新定义自动驾驶的动态视觉?谷歌提出几何优先的动态场景方法MonST3R
【免费】自动驾驶仿真实践:Apollo&CARLA联合仿真: L1 Apollo架构
自动驾驶公司招聘最看重什么?
NeurlPS'24 开源 | DC-Gaussian,基于3DGS的行车记录仪视频场景重建,有效去除反射遮挡
无人驾驶建图定位ndt定位快速入门:部署、测试,全过程精细讲解(主讲录制人:严正清;技术小组:小组:陈云、贾岚博、刘志强、张连会)
自动驾驶规划控制概况
基于点云场景的三维物体检测算法及应用
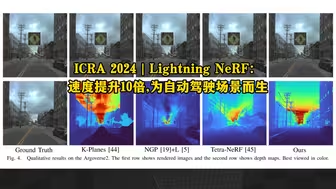
ICRA 2024|Lightning NeRF:速度提升10倍!为自动驾驶场景而生
清华&地平线最新开源!全任务SOTA!SparseDrive:端到端自动驾驶新范式!
告别3DGS算法,开源SUNDAE,实现内存效率与图像质量的双赢
97%!FlyNeRF:基于无人机的NeRF实现超高质量3D重建!
重磅出炉!高翔《自动驾驶与机器人中的SLAM技术》新书配套课程发布
StreamPETR—作分享:稀疏向量化表征长时序建模
中国科大新作 | 基于3D高斯的多模态融合在无界场景中的定位和重建
浙大、上海人工智能实验室等即将开源PGSR: 平面3DGS提升表面几何,超越 2DGS、GOF,实现渲染新高度
三维重建入门到精通,30分钟教你学会运动恢复结构SFM
AR光波导的应用与发展 | 郑昱
激光雷达、续航650km,聊聊广汽埃安AION RT
ECCV'24 | JHU提出无需SfM的X光3DGS技术: X-Gaussian,使得X射线新视图合成推理速度提升73倍!
端到端智能驾驶系统的优势与实现方式,以及端到端智能驾驶系统是自动驾驶的未来吗?
ECCV'24 最新Oral已开源 ! | 用于 3D大场景生成的金字塔扩散模型,实现无限场景生成与高效数据迁移
谁能发明一个长途自驾小虫子防护罩啊 #激光雷达
当机器人遇到遮挡:IROS'24最新佳作揭秘「如何在视觉盲区保持精准人体追踪