V
主页
ICRA2020 | 多传感器融合实现点云地图构建 R-LINS
发布人
https://arxiv.org/abs/1907.02233 以机器人为中心激光惯导状态估计器,使用了迭代的误差状态卡尔曼滤波器(ESKF)来通过重复生成新的对应特征来递归的修正机器人的状态信息。 ------------------ 感兴趣的同学可以点击下方链接添加工作人员,获取更多人工智能海量资料,还有高质量行业交流群哦~ https://www.shenlanxueyuan.com/launch/B0184/detail
打开封面
下载高清视频
观看高清视频
视频下载器
多传感器融合感知
ICRA | 2024:牛津大学针对NeRF和激光雷达的缺点,提出了NeRF融合激光雷达SLAM的大场景重建系统
CVPR2024 | RCBEVDet:毫米波雷达-相机在BEV空间下的融合方案
HybriMap:结合PV和BEV特征的高清地图构建技术,实现nuScenes数据集性能提升4%
【免费】自动驾驶仿真实践:Apollo&CARLA联合仿真: L1 Apollo架构
IROS24新作 | 上交大秦通团队,MapLocNet:实现自动驾驶新突破 告别GPS的亚米级定位!
MAVIS:使用基于SE2(3)的精确IMU预积分的多摄像头增强视觉惯性SLAM,该研究成果已被icra2024接受。
多伦多大学等发布!面向LiDAR点云的无监督目标检测
ECCV'24 NVIDIA | DiPIR:堪称"变色龙",可将3D物体无缝融合进各种场景,提升视觉真实感
【已开源】秦通课题组新作入选IROS24!开启实车端到端泊车革命!
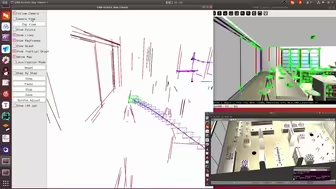
ATI-CTLO: Adaptive Temporal Interval-based Continuous-Time LiDAR-Only O
3D Gaussian Splatting在自动驾驶中的应用——建模动态城市场景
BEVFormer一作分享,基于时空融合的BEV感知”
赛尔S10扫描过程中SLAM飘了怎么办?
为应对不确定性问题,提出的框架VADv2:通过概率规划实现端到端矢量化自动驾驶
浙大最新开源!HVOFusion:使用混合体素八叉树进行增量网格重建
【面经分享】如何成为offer收割机?——移动机器人专场
清华&地平线最新开源!全任务SOTA!SparseDrive:端到端自动驾驶新范式!
无人机定位与导航
基于3D高斯渲染技术的高速稠密建图:SplaTAM
视觉SLAMVIO开源代码解析-DSO
视觉导航:从状态估计到运动规划
ECCV'2024 北航、极氪领衔 | FSD-BEV:大幅度提升基于视觉的3D目标检测算法性能,实现感知新SOTA!
AR与计算机视觉技术 | 吴克艰
多模态信息感知的SLAM | 吴毅红
基于图像的3D重建方法:无需COLMAP的3D高斯Splatting技术
StreamPETR—作分享:稀疏向量化表征长时序建模
大疆 CVPR 2024 | AFNet自动驾驶中单视图和多视图深度的自适应融合
图森未来在重卡自动驾驶的最新落地与实践 | 王乃岩
CloudCompare开源中文点云网格处理软件 27—点云采样抽稀
PETR—作分享:基于位置编码的BEV感知范式
SLAM with Event-based Vision Sensors: Past, Present, and Future | 周易
端-云协同的视觉定位与重建及应用 | 章国锋
深蓝学院精品课程之NeRF基础与常见算法解析:详解什么是神经辐射场
Cam4DOcc: 面向自动驾驶的视觉4D占用预测新基准,代码已开源,欢迎来拍砖
浙江大学,百度 | 显著提升BEV三维物体检测性能的体素池方法:BEVSpread
云乐小鱼800线控底盘产品介绍
自动驾驶规划控制概况
算法岗的招聘现状与未来——移动机器人与自动驾驶专场
10大与人工智能相关的<顶级会议>,哪些是你的投递首选?这些顶会论文与SCI论文相比如何呢?