V
主页
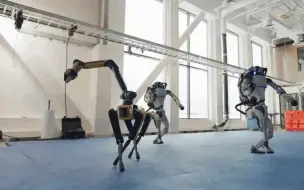
ETH发布! 使用腿式移动机械手学习开门和穿过门
发布人
使用门一直是机器人领域的长期挑战,并且在赋予机器人更好地进入以人为中心的空间方面具有重要的实际意义。该任务的难点在于需要在线适应各种门的特性,以及在操控门板和通过狭窄门口时的精确控制。为了解决这一问题,我们提出了一种基于学习的控制器,应用于腿式移动机械手,用来开门和穿过门。该控制器通过教师-学生模式在模拟环境中进行训练,以学习稳健的任务行为,并在交互过程中估计关键的门属性。与以往的工作不同,我们的方法采用单一的控制策略,可以通过学习到的行为处理推门和拉门,并在执行过程中无需事先知道开门方向便可推断方向。该策略部署在配备机械臂的腿式机器人ANYmal上,在实验设置中进行的多次试验中成功率达到了95.0%。额外的实验验证了该策略对不同类型门和外界干扰的有效性与鲁棒性。 文章名称:【Learning to Open and Traverse Doors with a Legged Manipulator】 文章链接:http://arxiv.org/abs/2409.04882
打开封面
下载高清视频
观看高清视频
视频下载器
ETH发布!轮腿式机器人的鲁棒自主导航与运动学习
清华最新开源:植被地形下轮式机器人的自主导航(附PPT!)
ETHZ最新发布X-ICP 极端环境下鲁棒的激光雷达配准
ETHZ开源|可与任何VIO前端兼容的SLAM通用后端!
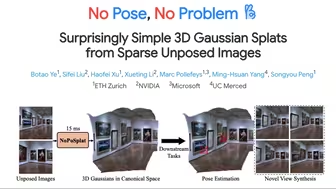
[3DGS进展] ETH, nVidia等提出NoPoSplat,简单的从稀疏无位姿图像生成3DGS的方法,在稀疏输入NVS、可泛化、位姿估计等任务均大幅度提升
油管激烈热评、我们生产的自爆蜘蛛机器人有多震撼!机动性超级强,全地形!买买买快来买!
四川省工训赛全省第六,可惜专科生不能打国赛,愿不了国赛梦了
可以在飞行中躲避快速移动物体的无人机
密歇根大学开源”本体感觉不变的机器人状态估计”
华盛顿大学与英伟达联合开源!用于大规模仿真环境和机器人运动控制
谷歌机器人子公司Intrinsic最新开源机器人抓取,无需收集数据或人工标注! ICRA 2022
350km+的记录,cm级精度的数据集!用于自动驾驶的视觉长期定位!TUM开源!
听起来高深莫测的SLAM技术到底是啥?SLAM技术简介及入门方法
IROS2022|腿式机器人+无人机强强联合,共同探索未知世界!苏黎世联邦理工研发
浙大章国峰团队发布CP-SLAM: 协同基于神经点的SLAM
双目VIO+点线特征+抗动态光照! 南洋理工最新开源!
【开源】宇树Unitree Go2四足机器人/机器狗Isaac Sim/Isaac Lab ROS2仿真平台
IROS 24 复旦大学发布! Polaris 基于Syn2Real视觉基础和大语言模型的开放式交互机器人操作
哈工大发布|首个基于线特征的红外惯性里程计ETIO,性能超过了最先进的TIO!
manim所有深奥的数学公式,变成动画片
MIT发布|无需lidar和IMU之间的相对定位,即可提供高速率的里程计估计!
宾夕法尼亚大学GRASP发布:3D主动度量语义SLAM
受限于美国的芯片出口政策,算力市场或将迎来新一轮浪潮!
电影:变形金刚汽车人;现实:不用变形也能站起来的小车机器人!
开源!AI的移花接木大法!不止能“换头”!
清华等联合开源!动态 3D 高斯超高保真头部重建
照片转动漫,原来二次元的冰冰长这样!可试玩!开源!
【原创】上海为什么能够后来居上,成为人工智能人才的引力场?
UCLA发布|效率提高20%,可快速且并行逐点去斜的里程计!
【直播回放】SLAM公司汇总
yyds!CMU最新开源无人机自主导航开发环境,加速无人机算法研发及部署!
UZH新发布|实现47.2%的平均精度,事件相机的RTV用于目标检测!CVPR2023
这个数据集真强!地下隧道、不同照明等情况下,多机器人视觉SLAM!MIT等最新开源!
【开源】百元价格就能实现学习ROS和SLAM导航的口袋式桌面机器人!
ICRA2022|首尔大学发布基于物体的矩阵李群视觉惯性导航系统!
浙大&Google最新发布|RGB图像引导下的基于轻量ToF传感器的深度估计!ECCV2022!
21个令人惊艳的创业机器人公司!
【开源】DSOL:一种快速直接稀疏里程计方案,处理速度提高5倍!宾夕法尼亚大学
上科大与中科院联合开源!捕获情境环境中的多人多物交互