V
主页
面向3D视觉的科研方法 | 论文投稿与流程
发布人
国内首个面向三维视觉的科研方法与学术论文写作教程:https://ebzbf.xet.tech/s/1bDMiV
打开封面
下载高清视频
观看高清视频
视频下载器
从零搭建一套结构光3D重建系统 [理论+源码+实践]
107 FPS!开源!结合ICP和3D GS构建最快的稠密SLAM!
清华最新开源万能3D分割一切!
MIT重磅开源!别再用COLMAP了!FlowMap给你最精确的SfM!
极快跟踪一切!DOT:无惧遮挡!
Kivicube AR平台:低代码可视化编辑即可完成SLAM场景制作
香港大学发表超强无人机实时避障算法:以后无人机再也不怕撞了!
ECCV'24开源 | DoubleTake深度估计& 三维重建最强解决方案!
这绝对是质量最高的单目深度估计开源方案!
WACV2023:基于结构光的RGB事件相机(代码开源)
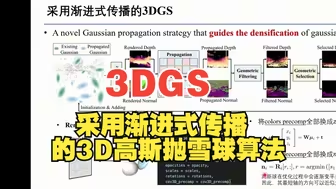
采用渐进式传播的3D 高斯抛雪球算法
无需标定板,高分辨率LiDAR和相机的像素级外部自标定,代码开源
SIGGRAPH 2021,AI武术指导化!帮助动画师生成武术动作!
神奇!树脂+玻璃+手机就能制作3D全息投影?
Facebook最新研究:在真实环境中3D视觉语音导航(ECCV2020)
HeadCraft-超逼真头部细微特征生成!3DMM的革命!
让NeRF动起来!PhysGaussian:生成任何物体的真实运动!
顶刊论文:LineTR:用于视觉定位的上下文感知线描述符
[ICCV 2021] 基于水体流动的可微框架进行水下单目3D重建
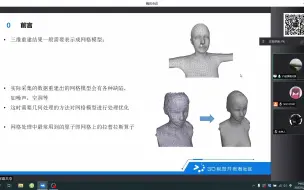
三维重建中的网格处理算法分享(公开课)
[CVPR2022] 使用单幅彩色点投影的深度学习高光谱和深度重建
ECCV'24 | FPV-NeRF,Meta的新视图合成方法,为无人机空间感知带来革命性提升
ICCV 2023|第一种稀疏的仅视觉的交叉视图定位方法!
给任何模型上色!腾讯打通三维重建最后一关:高质量纹理生成!
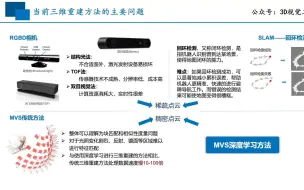
多视图几何MVS简介及MVSNet如何高效入门?
大作业|激光-视觉-IMU-GPS融合SLAM算法
CVPR2021,基于多视点鱼眼图像的实时球面扫描立体成像
什么是3D视觉无序抓取?
Nature正刊开源!突破低延迟自动驾驶视觉感知!
GRAM: 面向3D感知图像生成的生成式辐射流形
CVPR2023|基于深度学习MVS的最新进展 GeoMVSNet
来自Facebook的最新研究,基于神经网络,使用单张图像获取3D图片,真的接近实用了,手机端离线处理只需要几秒钟!发表在 SIGGRAPH 2020 代码开源
ECCV'24开源 !无惧遮挡、动态、光照变化!最鲁棒的3DGS震撼来袭!
ECCV'24开源 | 又快又好!6DGS重新定义6D物体位姿估计!
3DGS涨点神器!收录顶会NIPS 2024!3DGS-Enhancer来了!
【3D视觉工坊】第八期公开课:立体视觉之立体匹配理论与实战
SIGGRAPH2022 5s训练完成,基于多分辨率哈希编码的即时神经图形基元
缺陷检测—练习1:基于直方图统计的图像分割
高速结构光三维面形测量方法
03 自动驾驶中多传感器同步理论(Camera + LiDAR + Radar + IMU)(上篇)