V
主页
基于面结构光的高反射物体重建方法关键技术分享[相位偏折术]
发布人
课程地址:基于面结构光的高反射物体重建方法课程(相位偏折术):https://ebzbf.xetslk.com/s/1XtMmO 微信:cv3d007,咨询更多。 主讲嘉宾 光子猎人 清华大学博士 专注于结构光三维重建、高反射物体三维重建以及透明物体三维重建等领域的研究,研究成果被SCI期刊收录。 讲座内容: 1)从三维重建到高反射(镜面)三维重建 2)相位偏折术介绍和基本原理 3)相位偏折术的技术难点 4)实验效果演示
打开封面
下载高清视频
观看高清视频
视频下载器
高速结构光三维面形测量方法
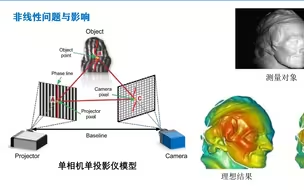
结构光的非线性问题与校正
四旋翼模型与控制基础
单目深度估计|连续帧方法实战课
光学3D测量技术原理及应用
传感器与遥控器校准原理
格雷码辅助实现的三维面形测量:从静态到动态
Open3D与点云处理简介(公开课)
公开课|结构光之相移法+格雷码技术详解
四旋翼模型简介-御风250模型
基于单张图片的3D人脸重建概述
Occupancy占用网络的多维应用探究
单目深度估计-动态物体处理方法
自动驾驶中实战基础之3D-2D求解方法
LVI-SAM代码实战与评估
从零搭建一套结构光3D重建系统 [理论+源码+实践]
PID控制器原理讲解
透彻剖析室内外激光SLAM算法与实战系列课程-激光SLAM传感器基本原理
传统深度估计方法实战
如何轻松拿捏LIO-SAM-数学基础篇
三维扫描仪技术概览+高亮透明户外扫描挑战
深度相机概述
LVI-SAM|视觉-惯性子系统(VIS)代码精读
零基础入门四旋翼建模与控制无人机 | 数学模型
ICML'24开源 !LEO:首个三维世界中的具身通用智能体-上篇
当MVS遇上Gaussian MVSGaussian 快速、可泛化的高斯重建框架!-上篇
四旋翼无人机-ADRC整体介绍
单目深度估|动态物体处理方法
四元数基础
点云3D深度学习模型与实践
四旋翼无人机-PX4控制算法代码
Open3D-三维数据结构
绪论|单目相机标定理论及张正友标定法(上篇)
国内首个面向具身智能方向的理论与实战系统课程
惯性导航简介
3D线激光相机检测技术解析与应用分享
面向大尺度室内场景的主动式重建方法(公开课)
四旋翼无人机-TD跟踪微分器原理与仿真
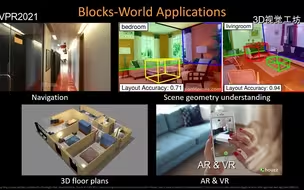
CVPR2021,结构光低计算成本准确恢复分段平面场景
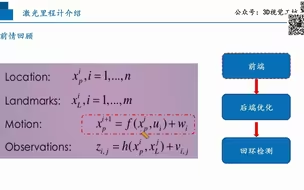
激光里程计精讲(上)