V
主页
面向大尺度室内场景的主动式重建方法(公开课)
发布人
主题:面向大尺度室内场景的主动式重建方法 大纲 1. 场景重建概述 2. 基于最优质量传输的传统方法 3. 基于二分图匹配的强化学习方法 主讲人介绍:董思言,山东大学博士学生,导师陈宝权教授。研究兴趣主要包括三维重建、相机定位、场景理解以及它们在机器人方向的应用。文章发表于SIGGRAPH、CVPR等会议。 作者论文: Multi-Robot Collaborative Dense Scene Reconstruction. SIGGRAPH 2019. Multi-Robot Active Mapping via Neural Bipartite Graph Matching. CVPR 2022. 直播地址:https://lgo.h5.xeknow.com/sl/4D6eBk
打开封面
下载高清视频
观看高清视频
视频下载器
MIT重磅开源!别再用COLMAP了!FlowMap给你最精确的SfM!
从零搭建一套结构光3D重建系统 [理论+源码+实践]
SIGGRAPH'2024|RTG-SLAM:基于3DGS的大尺度场景实时三维重建-上篇
ECCV'24开源 | DoubleTake深度估计& 三维重建最强解决方案!
基于单张图片的3D人脸重建概述
当MVS遇上Gaussian MVSGaussian 快速、可泛化的高斯重建框架!-上篇
【三维重建】InstantSplat:稀疏视角重建三维场景(无需SFM位姿)
牛津VGG团队最新开源!Flash3D:一张图像重建整个3D场景!通用性超强!
国防科大最新 | DistGrid:基于分布式神经辐射场阵列的大规模场景重建
重磅开源SA-GS:重新定位最新大场景3D重建SOT
3DGS进化?2DGS颠覆3D场景重建!
四旋翼模型与控制基础
如何进行三维重建?从单帧深度估计到完整模型重建
面向3D视觉的科研方法 | 论文投稿与流程
多视图几何MVS简介及MVSNet如何高效入门?
三维点云系列视频——第一章绪论
清华最新开源万能3D分割一切!
四旋翼模型简介-御风250模型
CVPR2023|基于深度学习MVS的最新进展 GeoMVSNet
中科院最新CityGaussian:VRAR时代的城市重建新标杆-上篇
SGS-SLAM:神经密集SLAM的语义高斯飞溅
国内首个面向具身智能方向的理论与实战系统课程
无相机姿态40秒重建3DGS方法
DoGaussian:分布式训练3DGS,速度提升6倍以上,高质量渲染-上篇
Splatam:用于稠密RGB-D SLAM的3D高斯的溅射、跟踪和建图
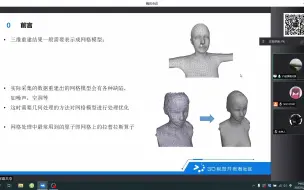
三维重建中的网格处理算法分享(公开课)
女阳三维坍塌后快速重建:破幻后回归生命真相,真相就是你是本自具足的,无需害怕
光学3D测量技术原理及应用
Open3D与点云处理简介(公开课)
【几何直觉】3D Gaussian Splatting(三维高斯泼溅), SuGaR 背后的几何 insight 讲解
107 FPS!开源!结合ICP和3D GS构建最快的稠密SLAM!
【三维AIGC】GSD:从单张视图中重建3DGS的扩散模型
单目深度估计|连续帧方法实战课
PID控制器原理讲解
激光雷达3D真彩场景实时重建
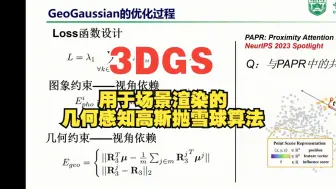
用于场景渲染的几何感知高斯抛雪球算法
透彻剖析室内外激光SLAM算法与实战系列课程-激光SLAM传感器基本原理
透彻剖析室内外激光SLAM算法与实战系列课程-激光SLAM精讲(下)
GS-SLAM:具有3D高斯溅射的稠密视觉SLAM
相机标定的基本原理与经验分享